正向运动学
以台湾大学林沛群教授的机器人学课程为例,链接内容:https://www.bilibili.com/video/BV1v4411H7ez
第三章及之后课程讲的就非常好了,可以看一下。
简介
第三章讲的正向运动学,说白了,就是机械臂分别旋转/移动多少角度,求出机械臂末端点的坐标变成了多少。
由于课程讲的很好,这里只记录一些简单的笔记。
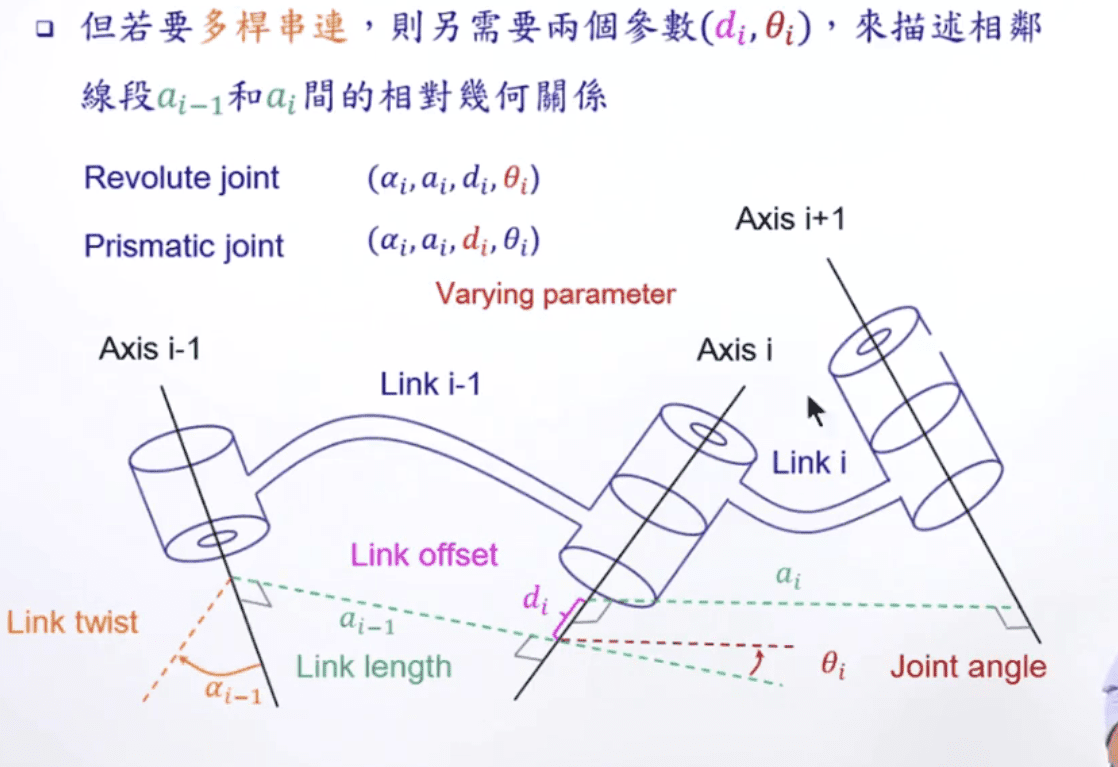
关节参数说明
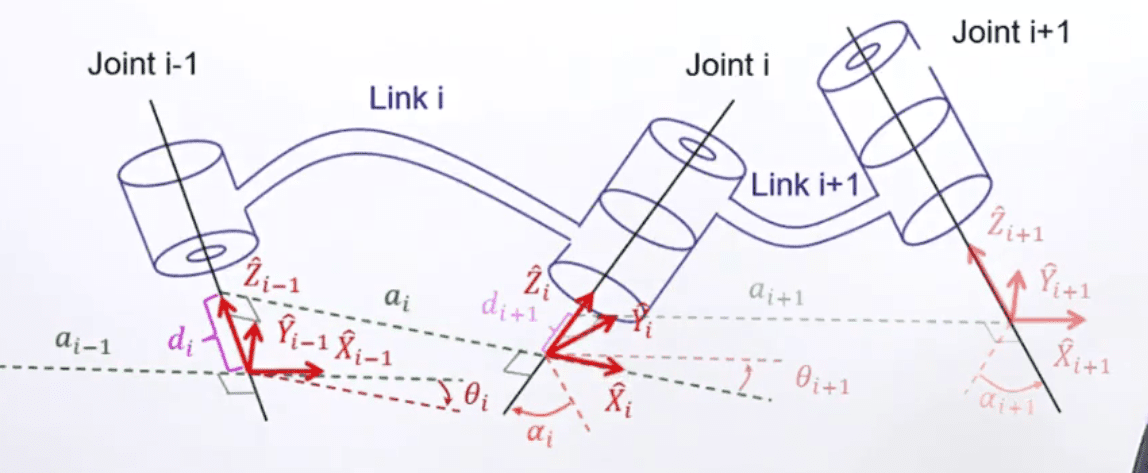
如下图所示,一些参数说明:
\(a(i-1)\) 的理解
以下说明可以帮助对于 \(a(i-1)\) 的理解:
-
两条不平行不相交的线,之间就是能找到一条公垂线,这是毋庸置疑的公理。
-
上面这两条线,其中一条绕着另一条得到单叶双曲面,如下图所示(来源):
-
这两条线按照上面所说的旋转,公垂线长度是始终不变的,可以理解成公垂线是一根绳子,然后其中一条线绕着两一条转,绳子不会变动。
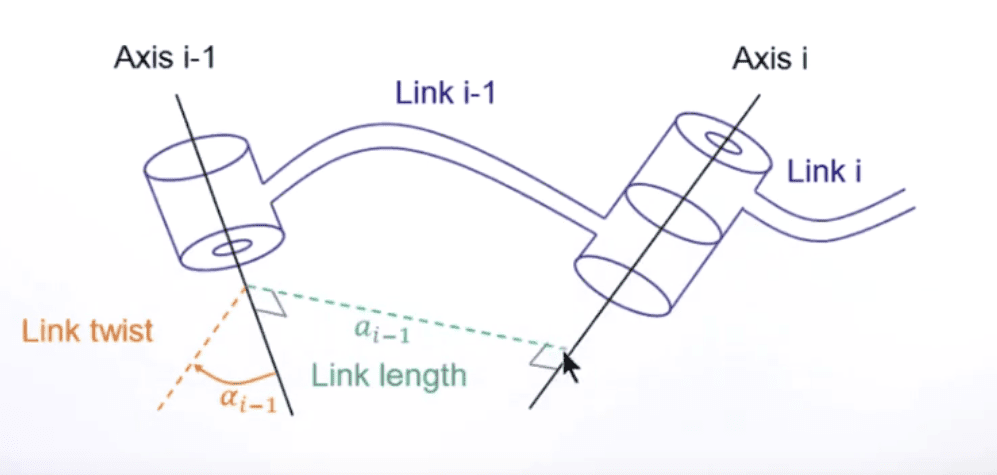
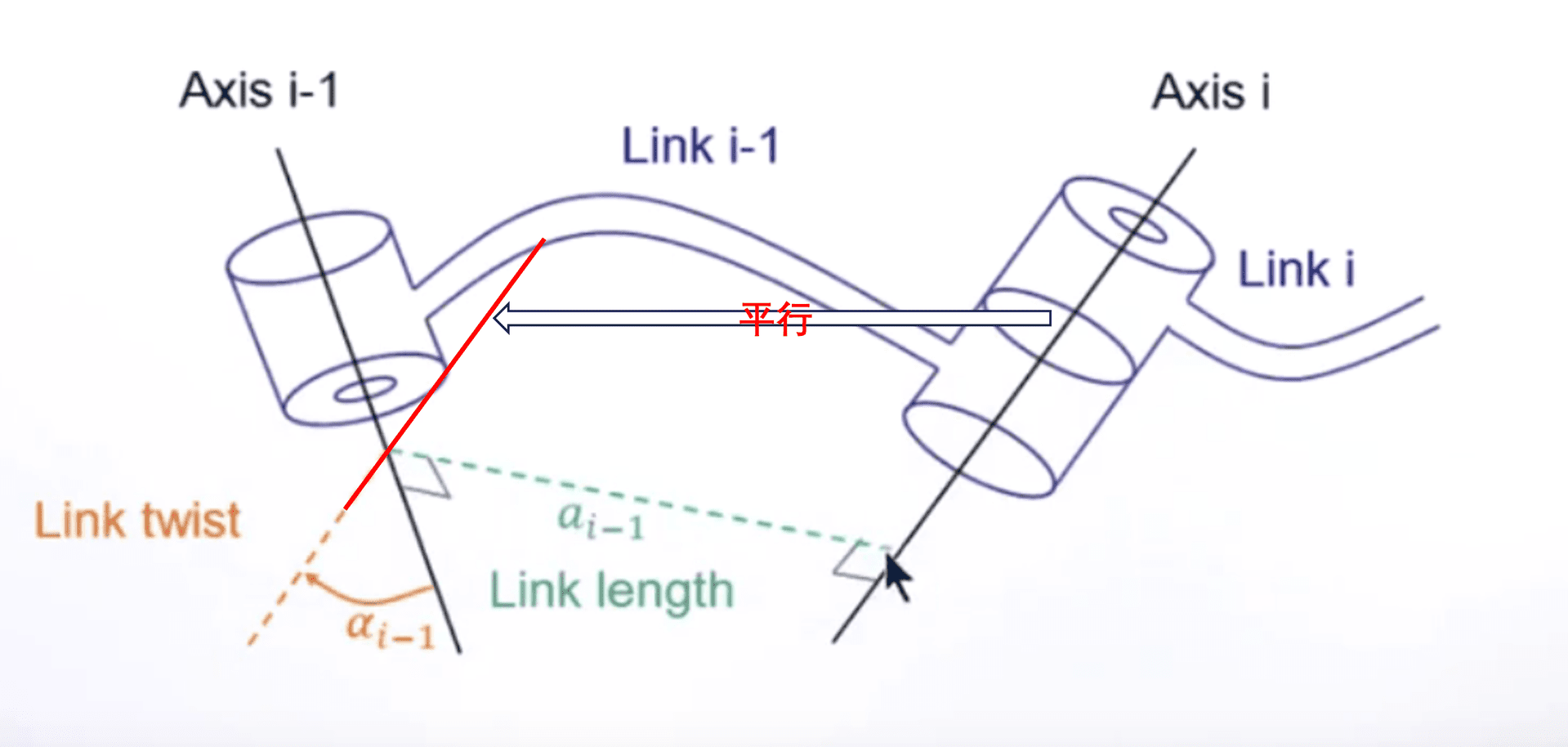
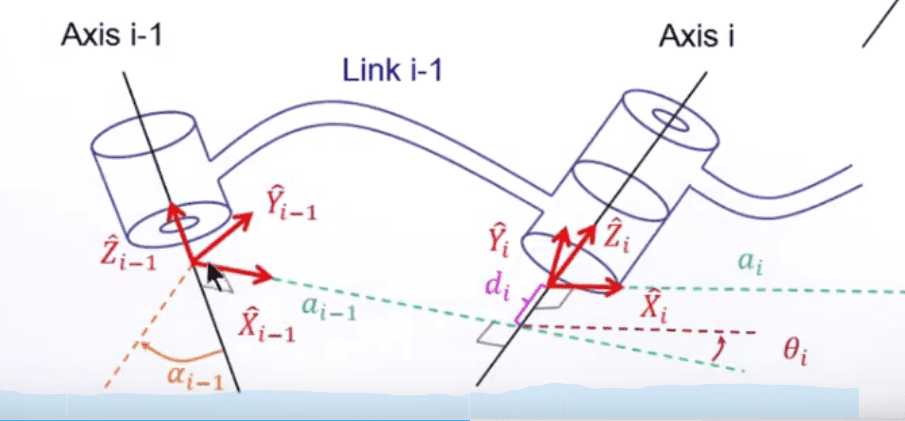
对于 \(\alpha(i-1)\) 的理解:
PPT 的图不是很直观,其实就是两个轴之间的夹角,看下方的图。
总结
只有 \(a(i-1)\) 和 \(\alpha(i-1)\) 固定好了,当其中一条线固定了,那另一条线也就固定了。
剩下的还有两个参数,参数很多,但是都很好理解,慢慢理解。
坐标系建立
之后就是建立坐标系,如下图所示,很简单。轴方向为 Z,公垂线方向为 X,右手定则确定 Y:
其中视频中讲解了第 0 个坐标系和第 n 个坐标系,很抽象,但是其实再往后看,看例子就明白了。 这里就简单说一下,比如第 0 个坐标系,规定了 Link0 是不动的,所以第 0 个坐标系完全和第一个坐标系一模一样就可以:
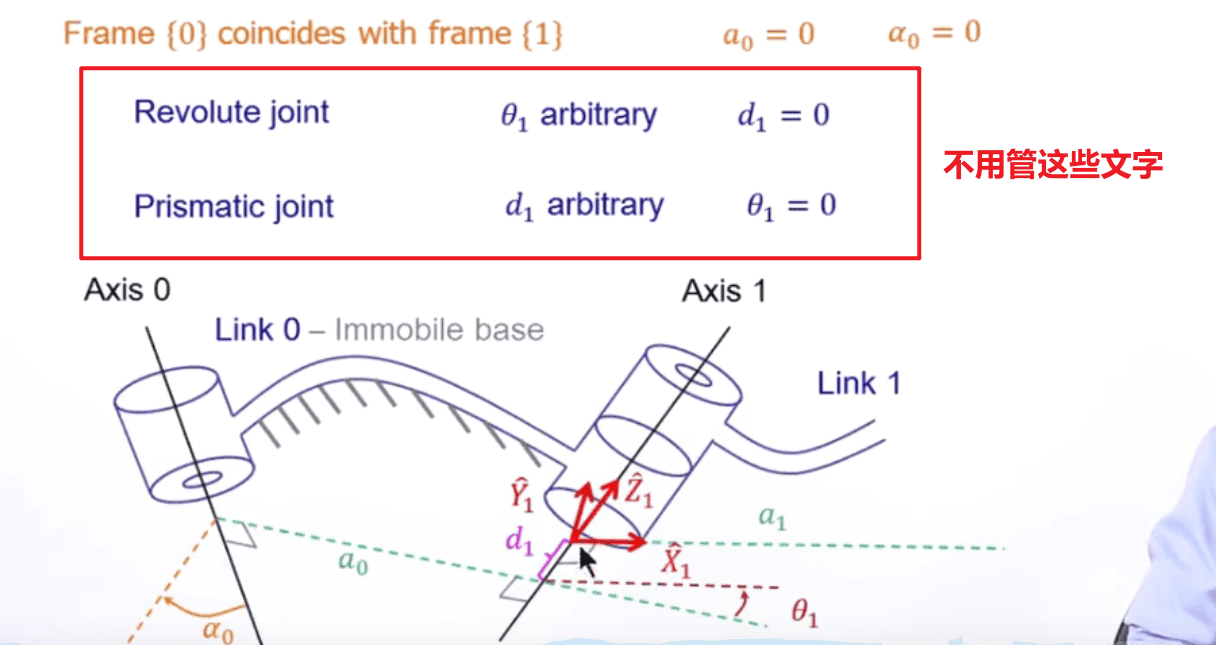
之所以有首尾两个坐标系,是为什么后续好求解。
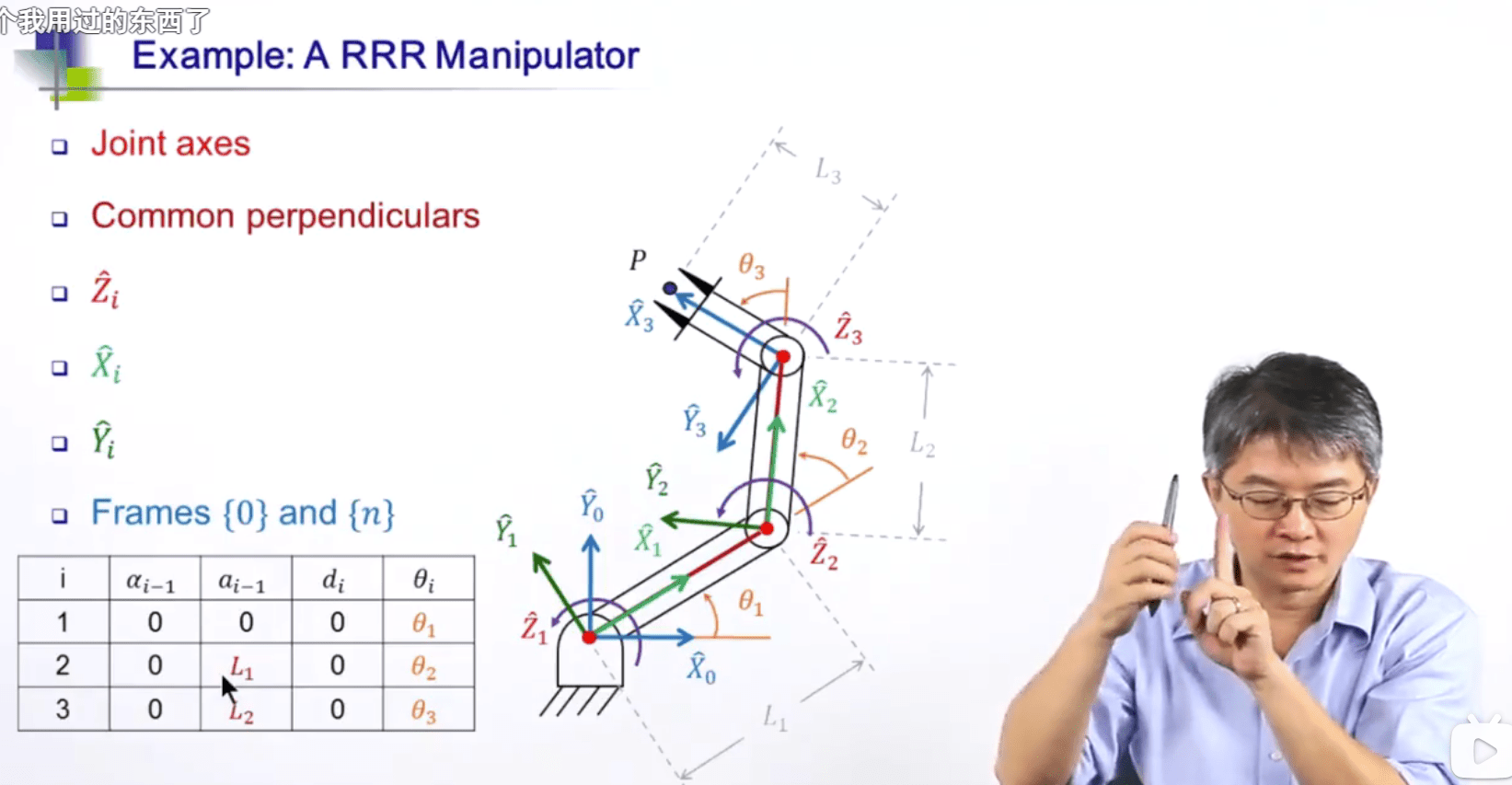
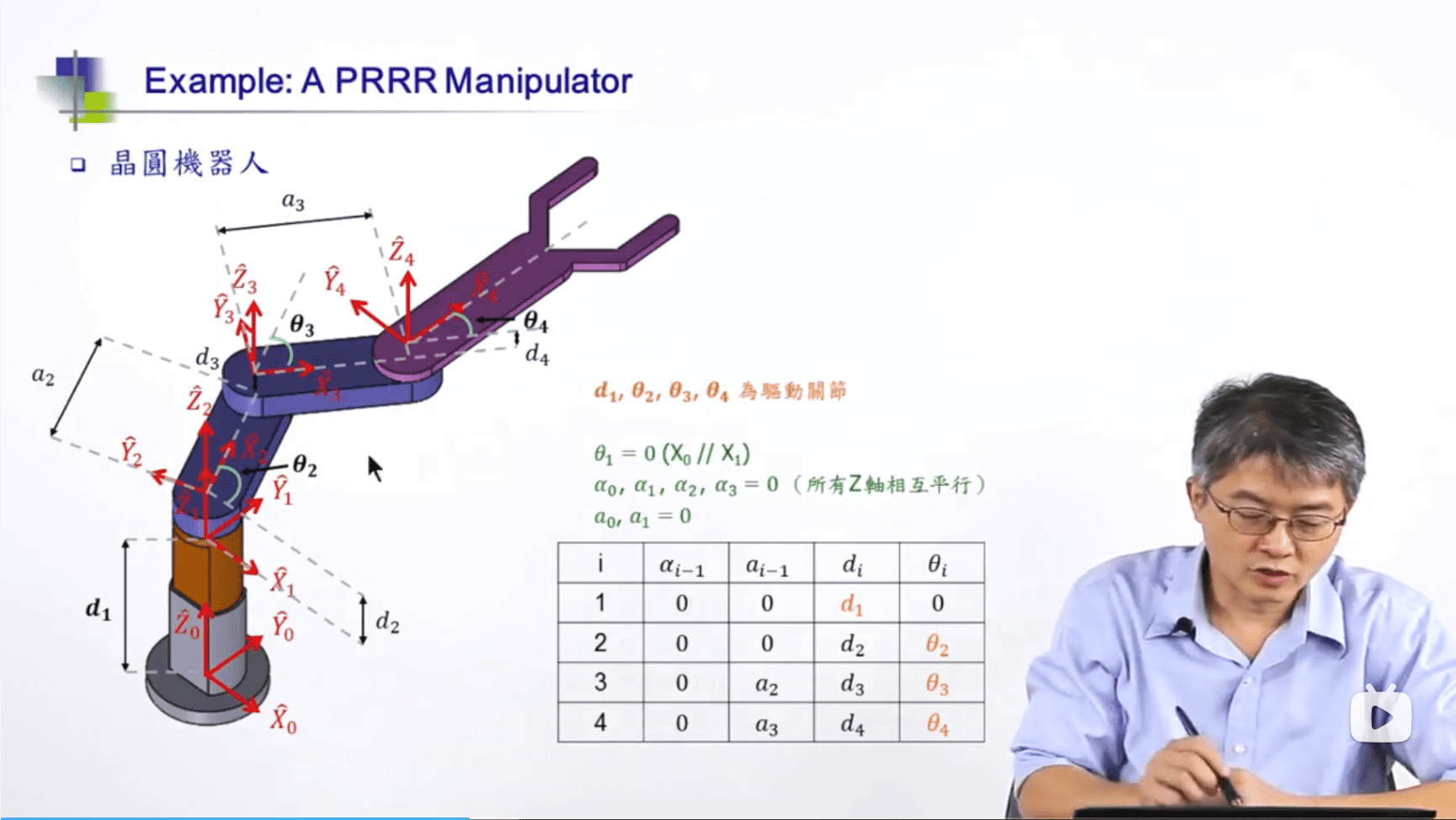
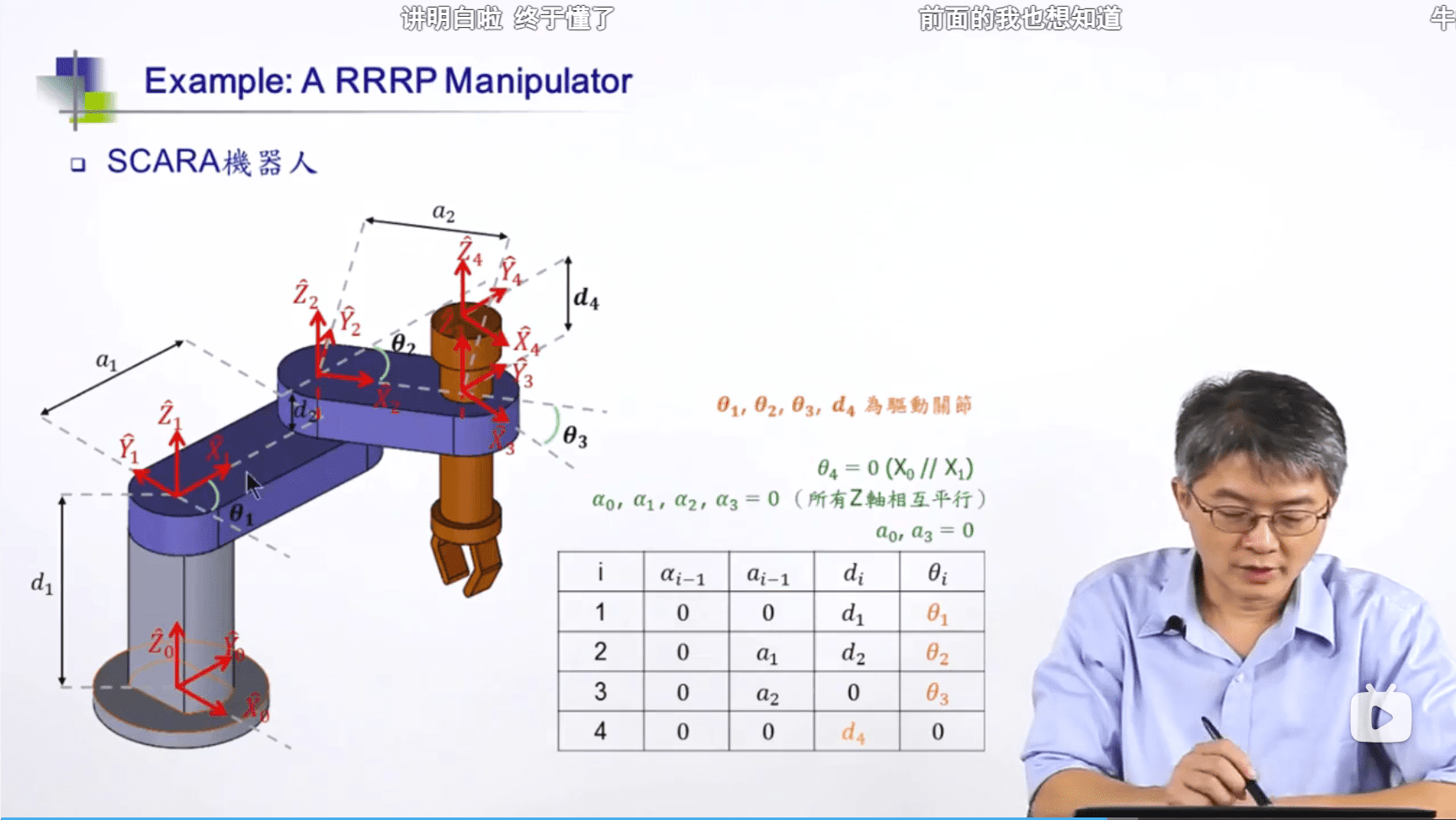
例子
视频后面的单元全部都是例子说明,可以快速过一遍(除了 3-6-01 不用管,见下面章节),都是非常好的例子。
DH Standard
在 [3-6-01] 的视频中,讲了 DH Standard 的表示方法,其实就是杆子的序号不同,如下图所示,Craig 表示法是 Axis(i-1)--Link(i-1)--Axis(i),而 Standard 表示法是 Axis(i-1)--Link(i)--Axis(i)。不用细究,Standard 表示法比较少用到。