DQN
引言
上一章节我们算出各个 \(Q(s, a)\) 的值,这样我们可以从 \(s_0\) 开始逐步推出动作。这些方法都叫做表格法。
表格法有什么局限呢?比如 Q-Learning,使用一个 Q 表格来存储每一个状态-动作对对应的 Q 值。当状态空间或动作空间很大,甚至连续时,Q 表格会变得非常庞大,具体的缺点想必我就不用说了,存储、时间等等等。而现实生活中往往是这样的,比如下围棋。
神经网络的引入
那在如今这个时代,很显然了,使用神经网络去模拟这个 Q 表格,这样 Q 函数就变成了一个由神经网络参数所定义的函数:\(Q_\omega(s, a)\),其中 \(\omega\) 是神经网络的权重。
损失函数设计
那么如何去设计神经网络的损失函数,这样才能训练呀。我们希望这个 Q 函数和 Q 表格类似,那么 Q 表格有什么特点?回顾 Q-learning 的核心思想,是通过以下公式更新 Q 值:
所以最终收敛的时候:
我们希望设计的 Q 函数也有这个特点,自然而然地,想到设计他的损失函数为:
半梯度训练
我们如果给上面那个损失函数求导,会遇到一个问题,「估计值」和「目标值」都是神经网络计算出来的,这个和「监督学习」是有差别的:在监督学习中,目标值是固定的标签;而在这里,我们发现,「目标值」竟然是个「移动靶」?
这会带来训练的不稳定的偏差。为了解决这个问题,我们可以「假装」目标值是固定的,也就是说,在给损失函数求梯度时,我们认为 \(r + \gamma \max_{a'} Q_\omega(s', a')\) 是个常数,而只给 \(Q_\omega(s, a)\) 求导,然后像标准梯度下降一样对当前估计值计算梯度,然后更新参数。
因为我们只计算了函数的一部分梯度,而不是整个函数的梯度,所以这种方法称为「半梯度法」(semi-gradient)。当然这种妥协不是没有代价的,由于忽略了目标值对参数的依赖性,这种更新方式可能导致收敛性问题。但好消息是,我们终于可以愉快地训练这个神经网络了。
DQN 的技巧
经验回放
第一个问题就是「数据相关性」。在传统的监督学习中,我们通常假设数据之间是「独立同分布」的,样本之间没有依赖性。但是,在Q-Learning 这种,数据是智能体与环境进行交互,这些样本之间存在很强的「相关性」。例如,智能体连续向左移动几次,则这些经验样本在状态、动作和奖励上都非常相似。
高度相关的样本会使得模型在短时间内接触到相似的输入模式,导致模型参数更新的方向单一且不稳定。如果连续的样本都指向同一个方向的梯度,模型很容易陷入局部最优解。另外,这可能还会让算法的泛化性降低。
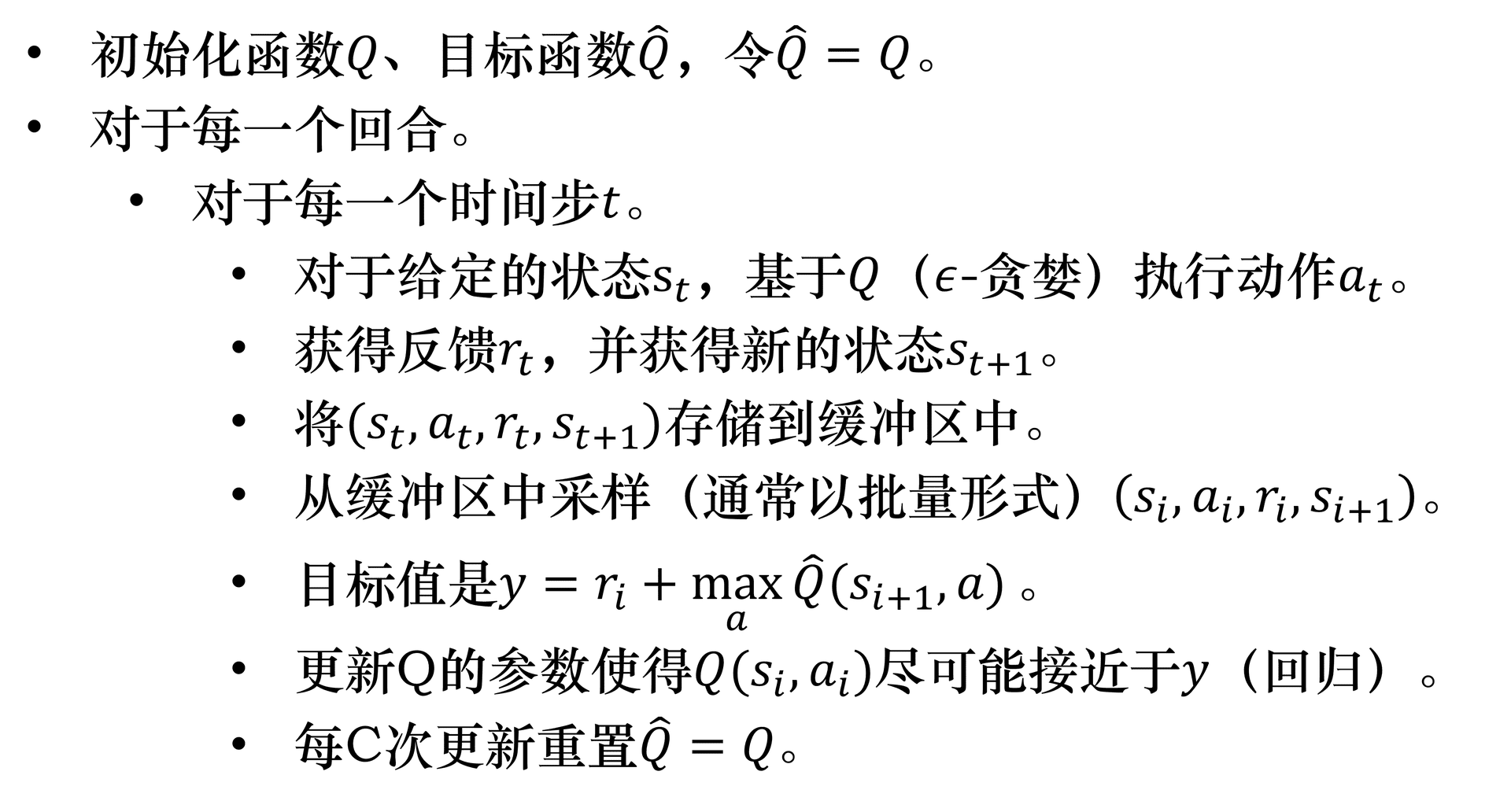
解决方式是使用 经验回放,将智能体与环境交互的经验存储到一个缓冲区中,然后从缓冲区中随机采样一批经验来更新 Q 网络。
这样有什么好处呢?随机采样打破了样本之间的时间相关性,使得模型在训练时接触到的样本不再是连续的序列,而是来自不同时间点的样本,从而降低了样本之间的时间相关性。同时,回放缓存中存储了过去多个时间步的经验,这使得每次训练使用的样本具有更高的多样性,有助于模型学习到更稳健的特征。
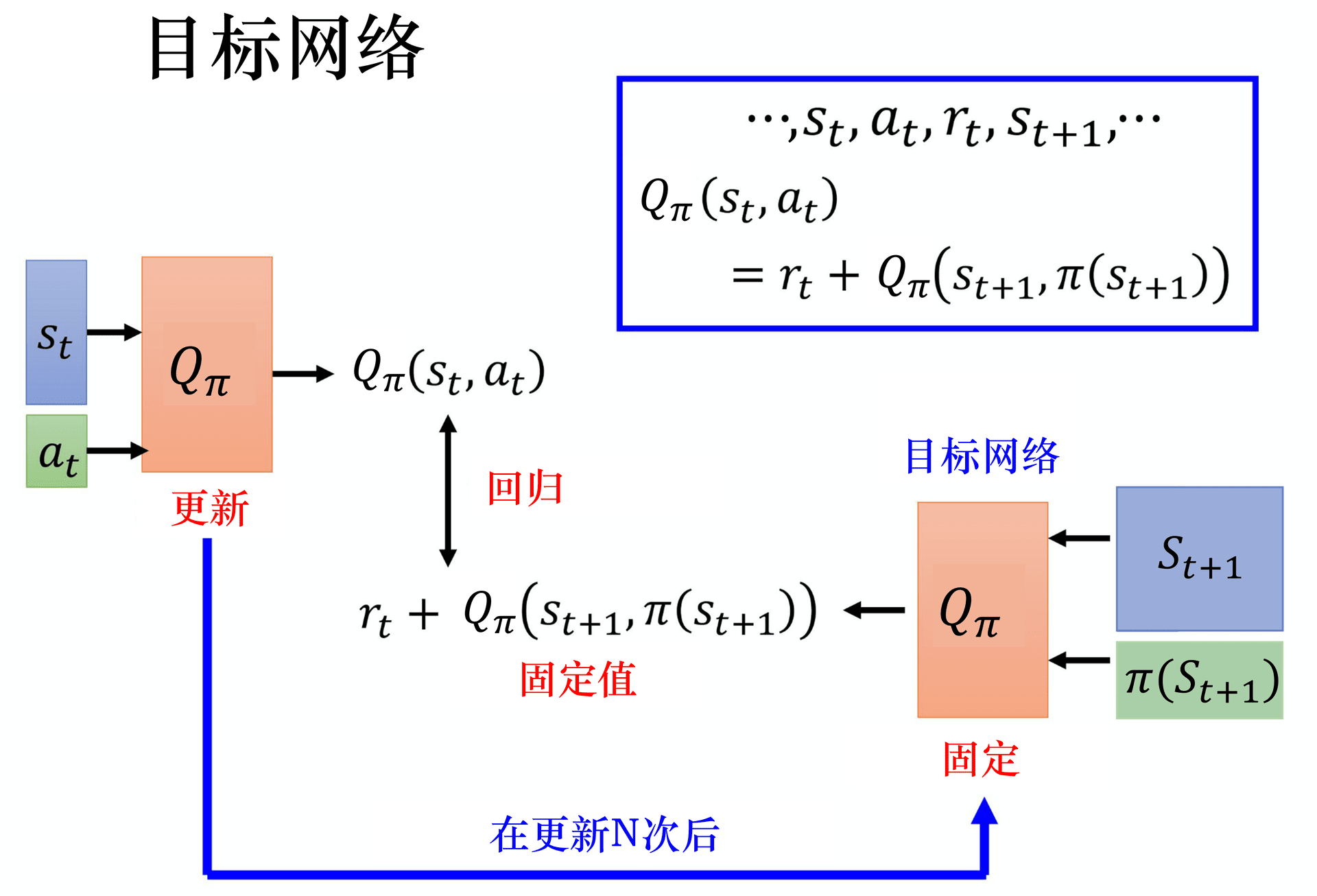
目标网络
我们前面介绍了「半梯度法」,但只是一种妥协之举,他只是权且让神经网络「可以」被训练而已,但这种方式仍然很不稳定、也容易导致误差累积。为了进一步缓解这个问题,DQN还会采用的一个技巧是「目标网络」(Target Network),其核心思想是使用两个不同的神经网络 :
- 主网络(Online Network) :用于估计当前状态动作的 Q 值,并根据梯度下降进行参数更新。
- 目标网络(Target Network) :用于计算 TD 目标,它的参数会滞后于主网络,从而提供更稳定的目标值。
目标网络的参数在一定时间内是固定的,从而避免目标 Q 值频繁变化,从而提高训练的稳定性。但又不是一直固定的,它隔一段时间会从主网络那里「同步」最新的参数,让目标值不要偏差太多。这在一定程度上打破了「Q值更新和Q值估计」的强关联性,降低了「自己追逐自己」的现象。
探索
这个和之前说的 \(\epsilon\)-greedy 方法类似,就是故意有概率走一些其他路径。这个和 Dropout 也有点像,总之具体细节就不谈了,当前我也没细究。这里引用一下别人的说法:
如果我们没有好的探索,在训练的时候就会遇到这种问题。例如, 假设我们用 深度 Q 网络 来玩贪吃蛇。我们有一条蛇,它在环境里面走来走去,吃到星星,就加分。假设游戏一开始,蛇往上走,然后吃到星星,就可以得到分数,它就知道往上走可以得到奖励。接下来它就再也不会采取往上走以外的动作了,以后就会变成每次游戏一开始,它就往上走,然后游戏结束。所以需要有探索的机制,让智能体知道,虽然根据之前采样的结果,a1 好像是不错的,但我们至少偶尔也试一下 a2 和 a3,说不定它们更好。
双 Q 学习(DDQN)
实际表现中,Q 值往往是被高估的,即 Q 网络得出的值比实际正确的值要大很多。原因:
神经网络存在随机性,假设在状态 A 选择左动作最好,但是训练的时候,恰好向右走遇到了一个较大的正向噪声,那么它可能会认为向右走更好久而久之,算法可能会错误地认为在状态 A 选择右动作更优,从而陷入次优策略。
双 Q 学习(Double Q-learning)是一种解决最大化偏差问题的有效方法。它的核心思想是将选择动作的 Q 值和评估动作价值的 Q 值分离开来。
在原来时,在状态 s 的时候,我们穷举所有的 a,把每一个 a 都代入 Q 函数,看哪一个 a 可以得到的 Q 值最高,那就选择这个动作 a,并且就把那个 Q 值进行更新。但是在 DDQN 里面有两个 Q 网络,第一个 Q 网络还是决定哪一个动作的 Q 值最大,但我们决定动作以后,Q 值是用 Q' 算出来的
而且上面提到的目标网络技巧中,原来的 DQN 其实已经有两个 Q 网络,这里 DDQN 可以直接复用。会用会更新参数的 Q 网络去选动作,用目标网络(固定住的网络)计算值。DDQN 相较于原来的网络的更改是最少的,它几乎没有增加任何的运算量,也不需要新的网络,如果只选一个技巧,我们一般都会选 DDQN,因为其很容易实现。
具体细节就不赘述了,因为我也没怎么了解。
其他
其他的都不去了解了,太过细节了:
- 竞争深度 Q 网络(Dueling DQN)
- 优先级经验回放
- 分布 Q 式网络
- ....