Pytorch 显存管理
复制本地路径 | 在线编辑
参考文章
1. https://zhuanlan.zhihu.com/p/680769942
2. https://zhuanlan.zhihu.com/p/681651660
写的会很简陋,而且只会涉及最最基础的内容。简单留存一下,花费不到五分钟的水文章。
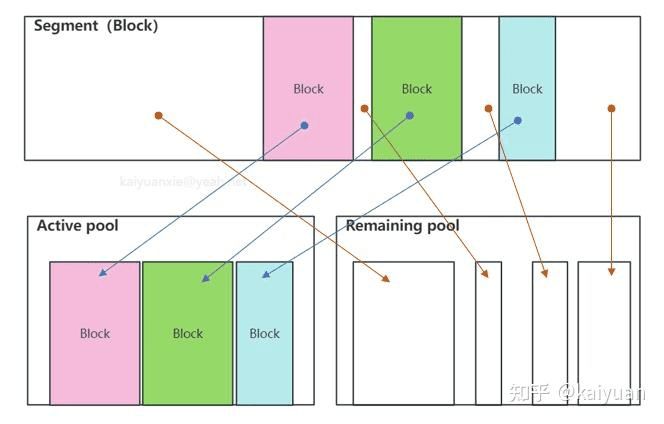
如下图所示,用两个 pool 管理空闲和占用的块:
结构体
上图中 block 的结构体,本质是用双向链表穿起来:
struct Block {
int device; // gpu
cudaStream_t stream; // 哪个stream开辟了的
stream_set stream_uses; // 哪些stream使用了该block
size_t size; // block size in bytes
BlockPool* pool; // owning memory pool
void* ptr; // memory address
bool allocated; // in-use flag
Block* prev; // prev block if split from a larger allocation
Block* next; // next block if split from a larger allocation
int event_count; // number of outstanding CUDA events
int gc_count; // counter for prioritizing older / less useful blocks for
// garbage collection
std::unique_ptr<History> history;
History* history_last;
}
上图中管理 block 的 pool 结构体,主要使用了 set 容器,排序和查找都很方便(CPP 中的 set 是可以根据索引获取的)。
struct BlockPool {
BlockPool(Comparison comparator, bool small, PrivatePool *private_pool = nullptr)
: blocks(comparator)
, is_small(small)
, owner_PrivatePool(private_pool)
{
}
std::set<Block *, Comparison> blocks; // Comparison 排序用的函数指针
const bool is_small;
PrivatePool *owner_PrivatePool;
};
整体逻辑
其实很简单。
- 申请一个块:查找有没有空闲的 block,如果要切分那么切分;
- 释放一个块:查找左右是否可以合并,如果合并就操作;