旋转矩阵和坐标系
以台湾大学林沛群教授的机器人学课程为例,链接内容:https://www.bilibili.com/video/BV1v4411H7ez
旋转矩阵
第一章可以跳过,第一章讲的啥,其实就是两个坐标系之间的旋转矩阵。没啥好说的,3x3 的矩阵,然后其实可以用三个角度来表示。如下图是绕着 Z 轴旋转 \(\theta\) 角度的旋转矩阵。
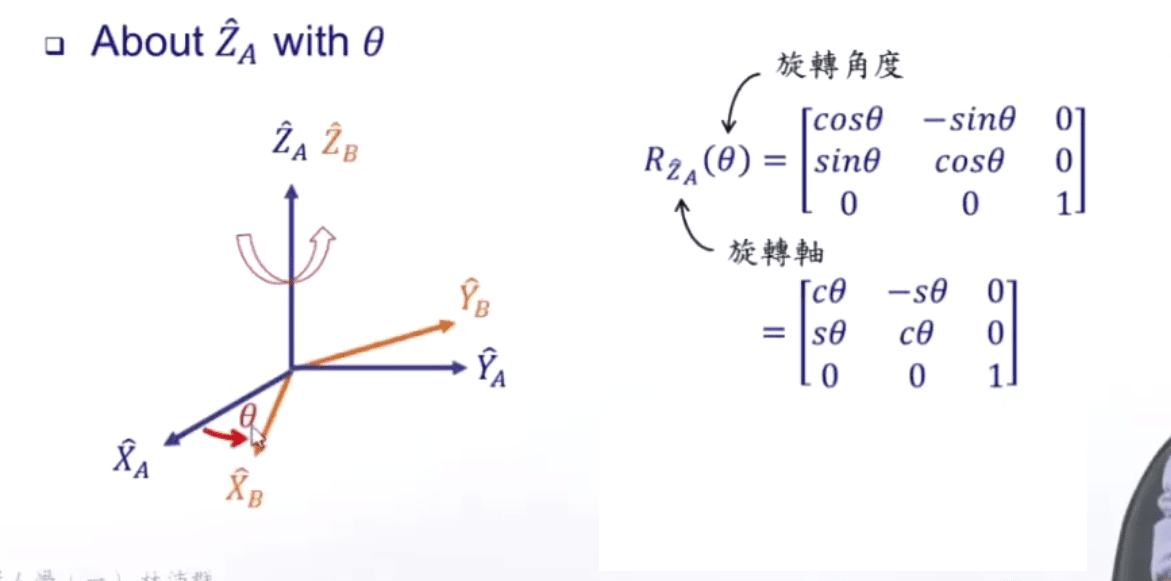
如果非要看第一章的内容,记住一句话:课程里面的 frame 其实就是坐标系。
旋转
第二章也可以跳过,第二章很重要,但是讲的不好。这篇文章讲的很好,下面进行个人记录。
两种旋转方式
首先,旋转似乎很简单,几个坐标轴转呗。但其实有固定坐标系旋转和机体坐标系旋转两种方式。
- 固定坐标系旋转:就是绕着始终不动的固定轴。
- 机体坐标系旋转:就是绕着机体本身的坐标轴。
最最经典的例子:飞机旋转。
- 固定系:按照地面坐标系,正东正北为 X 和 Y 轴,Z 轴垂直于地面向上。无论飞机怎么绕这几个轴始终没动过。
- 机体系:按照飞机自身,机头向前为 X 轴,机翼为 Y 轴,垂直于机翼向上为 Z 轴。此时飞机运动之后,坐标轴发生了变化。比如飞机绕着 Z 轴旋转之后,X 和 Y 轴就不再是之前的 X 轴和 Y 轴了。
核心问题
核心问题就是:某个向量绕 X 轴转一下、绕 Y 轴转一下、绕 Z 轴转一下,求最终的向量,或者说,求向量终端的点坐标。
由于有两种旋转方式,所以要分类讨论,如果按照固定坐标系怎么绕;如果按照机体坐标系怎么绕。
似乎很简单?我知道绕 X 轴旋转某个角度的旋转矩阵是 \(R_1\),绕 Y 轴旋转某个角度的旋转矩阵是 \(R_2\),绕 Z 轴旋转某个角度的旋转矩阵是 \(R_3\),那我直接相乘不就行了吗?
这些矩阵很好求,比如:
但是:左乘还是右乘? 也就是 \(R1*R2\) 还是 \(R2*R1\)?
固定坐标系旋转的推导
下面第一种情况,假设我们按照固定坐标系转。我们就统一按照先 X 轴转,然后 Y 轴转,最后 Z 轴转。求这三次旋转的各自角度,矩阵符号就用 \(R1, R2, R3\)。
上一小章节可以知道,核心是左乘还是右乘,先给出结论,是左乘:
定理一:固定坐标系旋转,应该是左乘
这个直接可以通过空间想象得到。旋转矩阵 \(R\) 的意义,就是某个点 P 变成另一个点 P',现在假设我已经绕 X 轴转动了,此时坐标是 \(R1 * p\),此时再绕 Y 轴转动,坐标就是 \(R2 * (R1 * p)\),很显然这是左乘。
所以最终 \((R_3R_2R_1) * p\) 就是最终的向量,或者说最终的点坐标。
机体坐标系旋转的推导
还是按照绕 X 轴转,然后 Y 轴转,最后 Z 轴转。求这三次旋转的各自角度,矩阵符号就用 \(R1, R2, R3\)。
一开始,\(R1\) 是一样的,但是此时绕 Y 轴转,就和固定坐标系绕 Y 轴旋转不同了。这里给出结论,是右乘:
定理二:相机坐标系旋转,应该是右乘
首先坐标系 0 绕 X 轴转,转到了坐标系 1;此时坐标系 1 绕 Y 轴转,变成了坐标系 2。求出点 p 旋转之后,在坐标系 0 的坐标。
-
第一个子问题,先忽略坐标系 0,假设点 q 在坐标系 1 中的坐标为 \(q_1\),此时绕 Y 轴转,变成了点 \(q'\),求出 \(q'\) 在坐标系 1 中的坐标 \(q'_1\)
很简单,这就是一个最最原始的旋转问题,可得:\(q'_1 = R2 * q_1\)。
-
第二个子问题,点 p 在坐标系 1 中的坐标为 \(p_1\),求点 p 在坐标系 0 中的坐标 \(p_0\)。
这是坐标系的旋转,具体就可以理解成,向量顺时针转,就相当于坐标系逆时针转。有结论:\(p_0 = R1 * p_1\)。
-
第三个问题,点 p 在坐标系 0 中的坐标为 \(p_0\),绕 X 轴变成了点 q,求点 q 在坐标系 1 中的坐标 \(q_1\)。
理解成坐标系和点在进行整体移动,很直观可以得到:\(q_1 = p_0\)。
现在理一下,首先点 p 绕 X 轴后得到点 q,再绕 Y 轴后得到点 \(q'\),我们需要求 \(q'_0\) 和 \(p_0\) 之间的关系。
根据那么可以得到:
因此,最终可以得到,按照机体坐标系,应该是右乘。
扩展
- 机体坐标系中,不仅仅可以 X-Y-Z 这种旋转,其实还可以 X-Y-X 这样旋转,这种也是可以做到三维改变的效果
- 由于机体坐标系是右乘,固定坐标系是左乘,所以显然:固定坐标系 X-Y-Z 旋转等价于机体坐标系按照同样的角度 Z-Y-X 旋转。
总结
重点就是记住:旋转有两种方式,而且一个对应左乘,一个对应右乘。遇到旋转问题时,一定要弄清楚是哪种旋转方式,这样才理解方程。
但其实机器人这里好像大部分用机体坐标系。