轨迹规划
以台湾大学林沛群教授的机器人学课程为例,链接内容:https://www.bilibili.com/video/BV1v4411H7ez
第五章和第六章讲了轨迹规划,轨迹规划就是规划机械臂的轨迹,让机械臂按照规划的轨迹运动。
引言
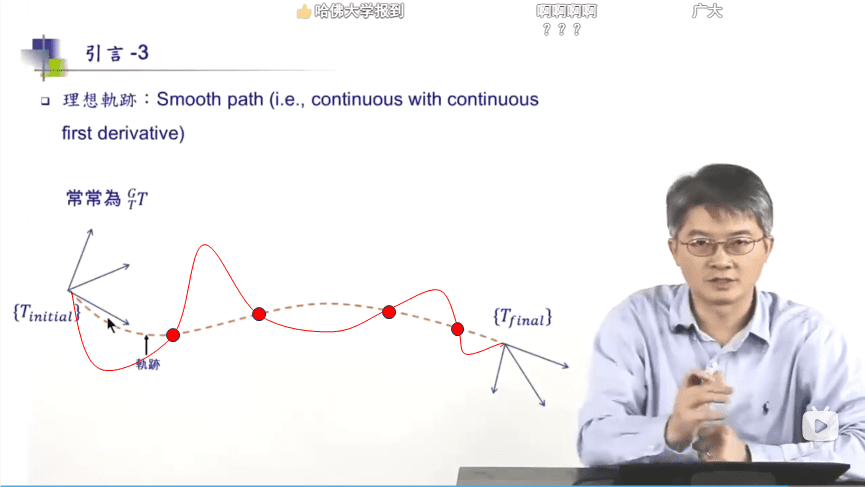
首先是介绍,5-1 小节讲的还是有点复杂了,就看下面的图就行了。有起始点和中间点,我们要规划出机械臂的轨迹,让末端按照规划的轨迹运动,显然图中虚线比红线更要合理。
5-2 和 5-3 都不要看,其实就讲了一个核心:规划合理路径有两种思路:
- Joint-space:算出各个关节要运动的情况,让关节突变不要严重
- Cartesian-Space: 直接是末端端点的运动情况即可,这种可以最直观和最优路径
通常用的是 Cartesian-Space,比较简单直观。
然后就开始讲了轨迹规划的细节,因为涉及到了两章,所以可能会有点长。
Cubic Polynomials
第五章剩下部分,讲了其中一类方法:Cubic Polynomials。
思路描述
很简单,用三次方程去模拟。如下图所示,现在先当成一维去想,其中 \(\theta\) 表示位置,\(\theta'\) 表示速度:
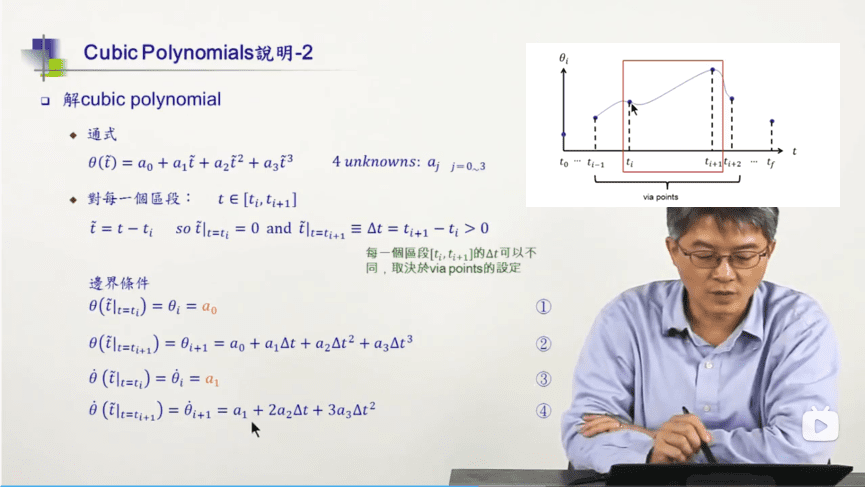
所以也是普通的解方程。上图中,最后方程三和四,速度我们是不知道的。所以我们要定义最下面两个方程,也就是定义前后端点的速度。有几种方法。
-
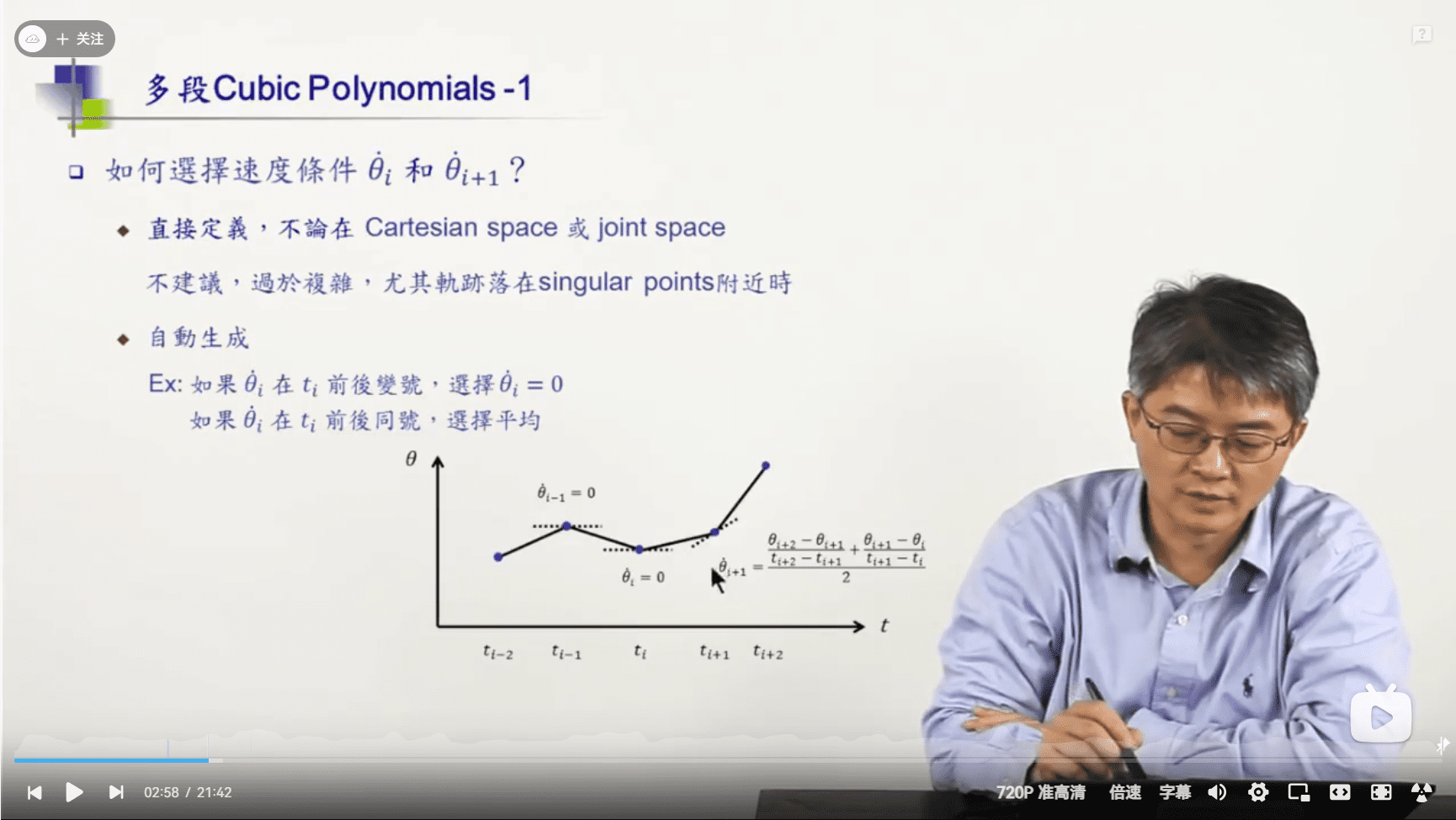
直接定义:没错,非常简单粗暴,或者就是简单用一下规则,如下图所示。
-
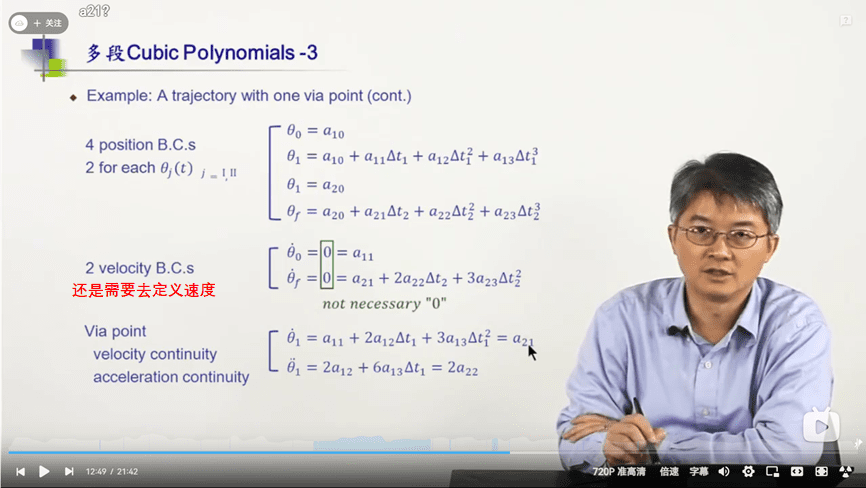
加速度是 Continous,也就是某个点他是第一段的末端,同时也是第二段的起始点,要保证这个时候加速度是一样的。这样要用三个点去联立,八个未知数一共八个方程,其中点 0 是起始点,点 1 是中间点,点 2 是末端点:
扩展到所有点(General Cubic Polynomials)
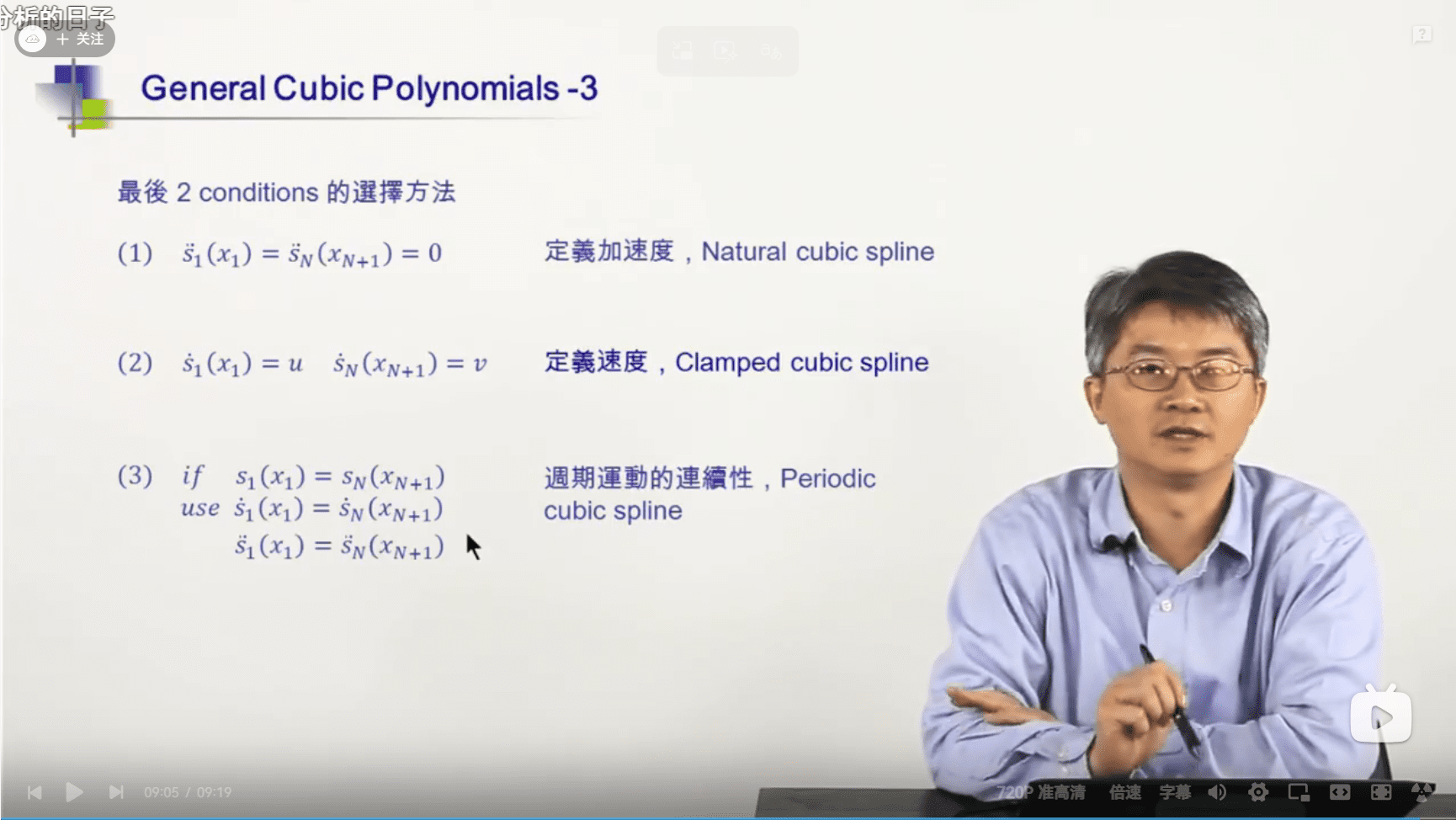
5-6 小节刚开始就是把上面的方法扩展到所有点。本质上都是一样的,同理,从上面中可以知道,需要我们去定义首末端点的行为去增加两个方程,这样才有唯一解。比如定义速度、加速度等等。
习题
5-6-02 和 5-6-03 讲了一个非常棒的例子,如下图所示:
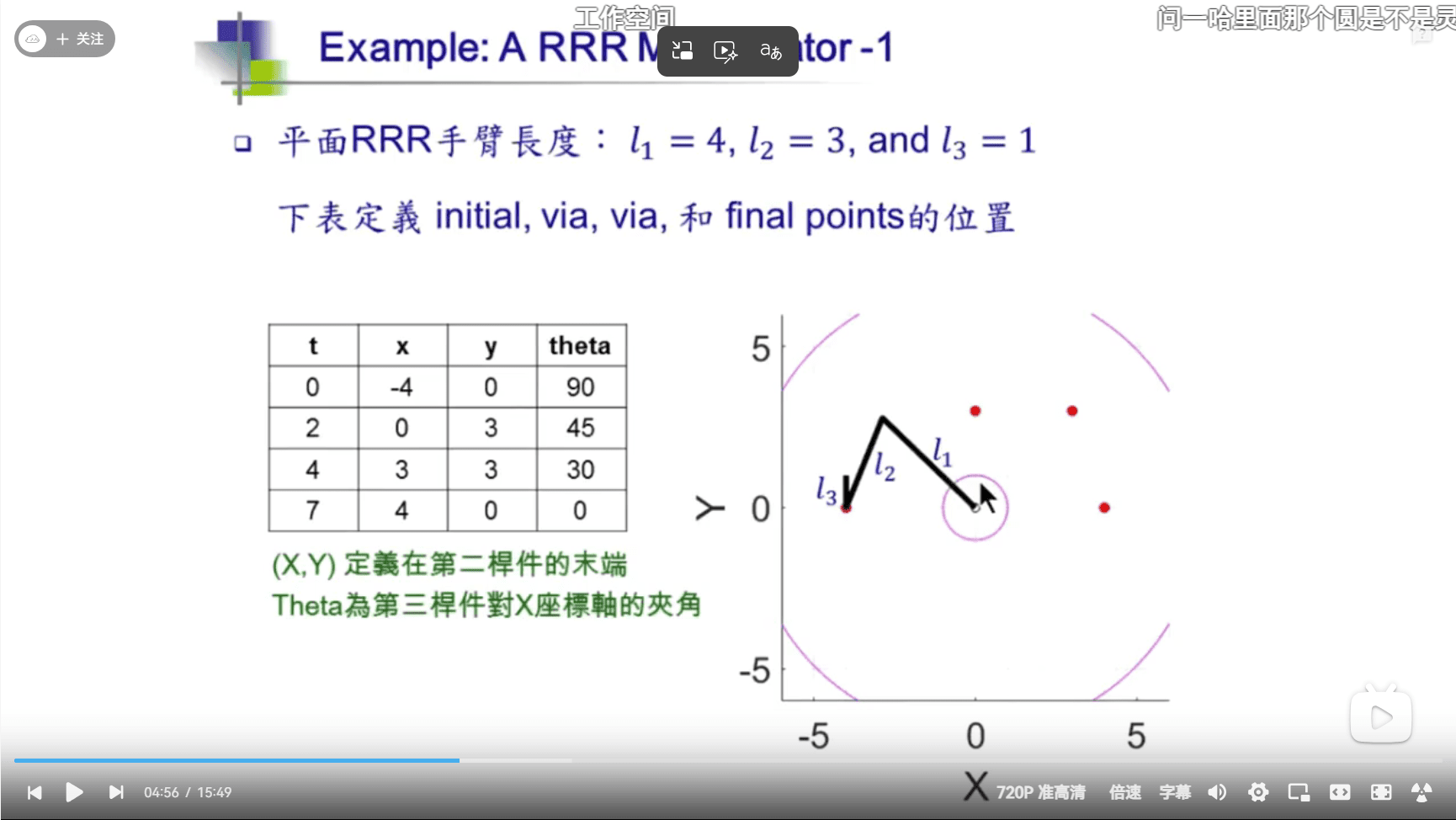
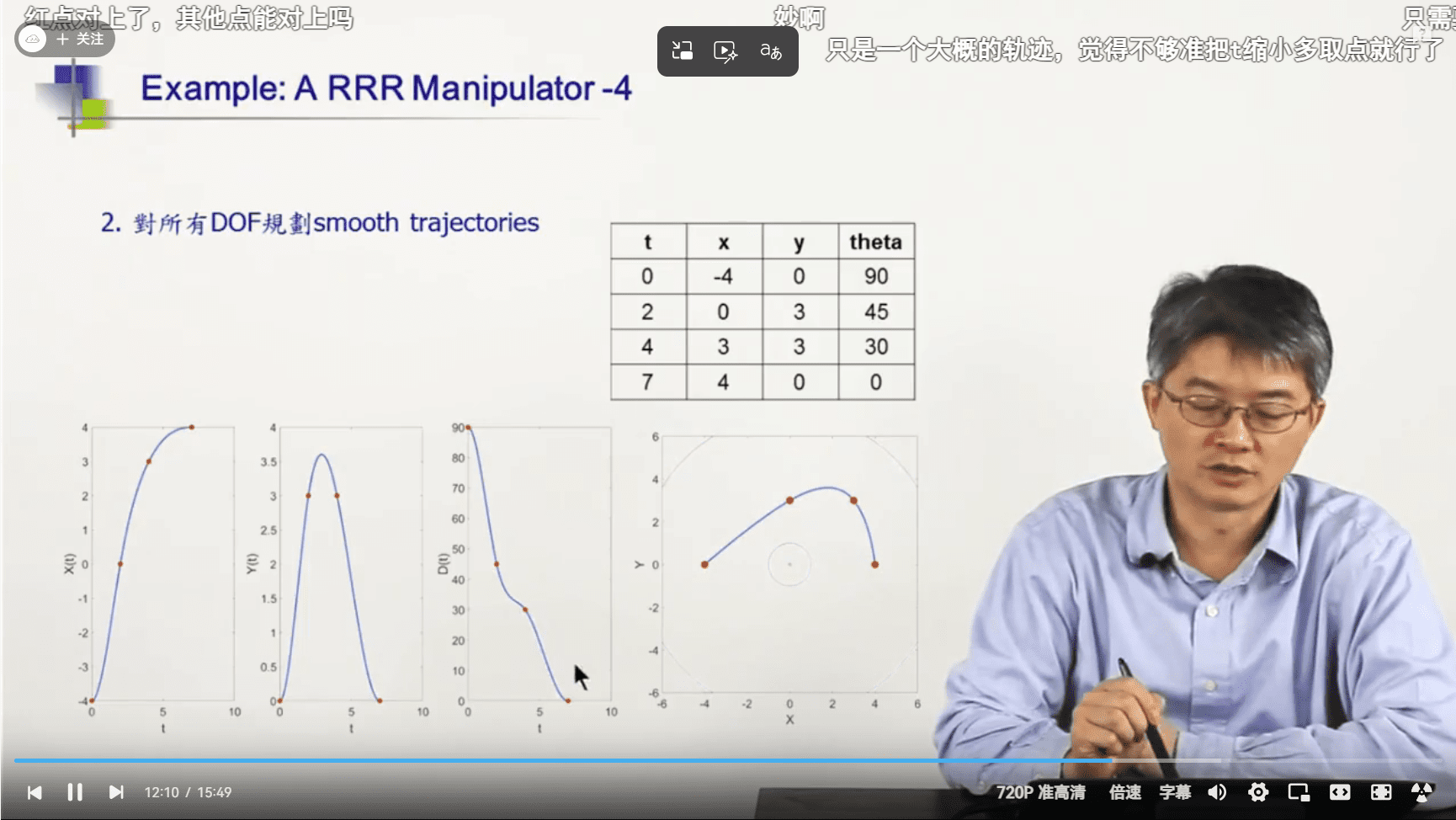
其中,5-6-02 讲了在 Cartesian Space 下的情况,本质就是上面讲的原理的直接套用,最终求出轨迹规划之后,再反推各个关节的运动情况。如下图,左边三个子图就是轨迹规划完成之后反推到各个关节的运动情况。
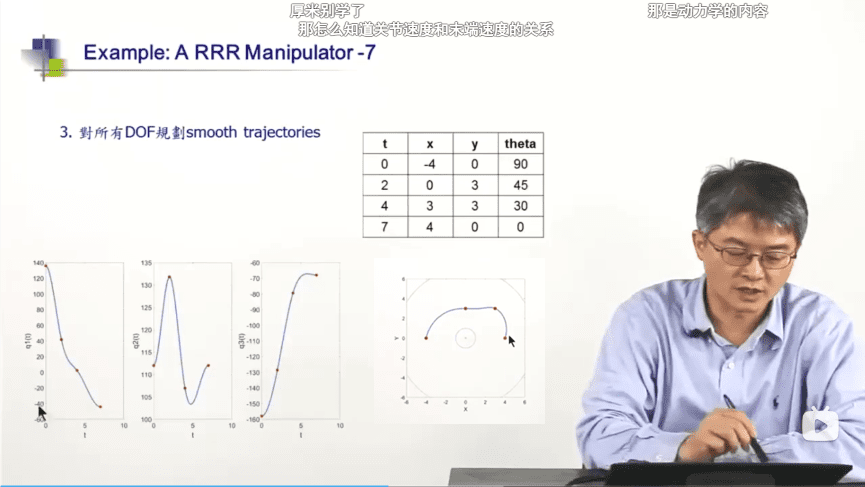
5-6-03 讲了在 Joint Space 下的情况,本质就是先求出几个中间点的时候,各个关节的角度,然后在每个关节上自己独立去做上面的 Cubic Polynomials。如下图,左边三个子图是各个关节独立去做规划的,做完之后合成到位置上,得到右图的轨迹。
Linear Function
第六章讲轨迹规划另一个方法:Linear Function with Parabolic Blends。
思路描述
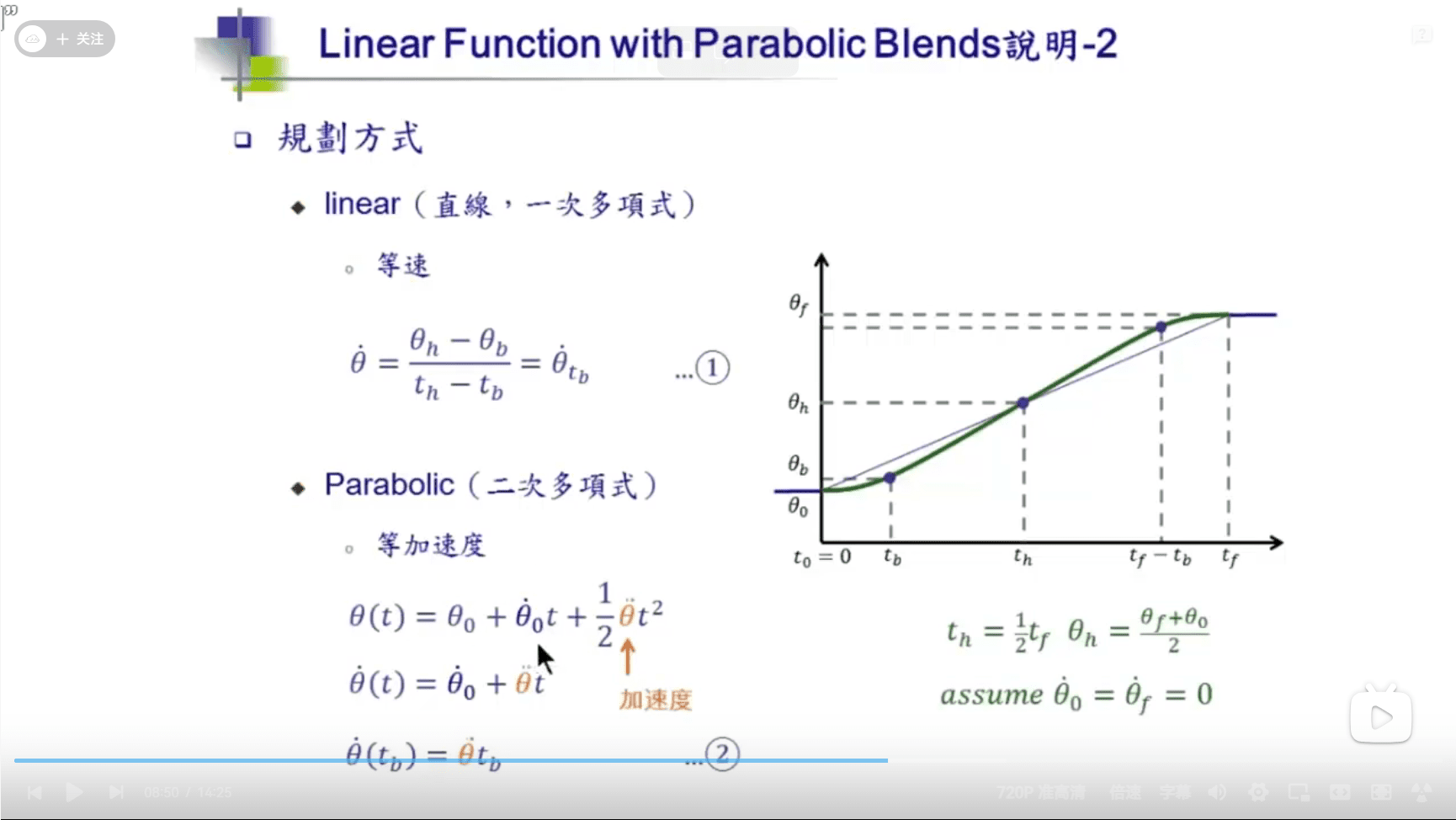
如下图所示,其实就是变成两点之间直线运动。这种规划确实蛮符合直觉的,我们肯定是希望直线更好。
但是由于关节从静止到运动,需要缓冲一下,实际情况是绿色的线。前面会有一段加速之间,中间保持匀速,最后再减速。
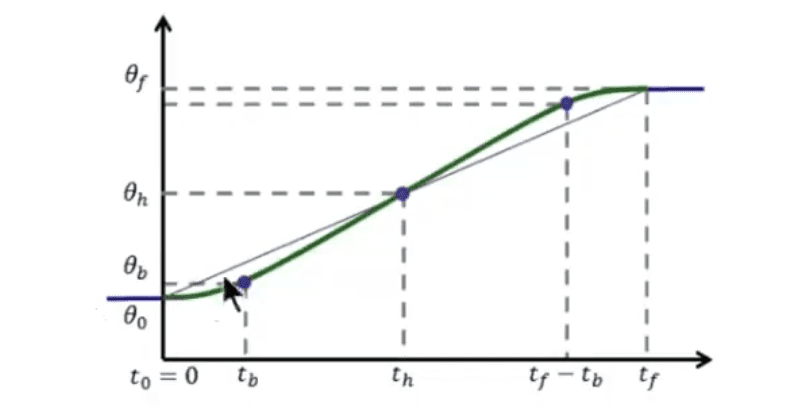
6-1 小节就聚焦一段的情况,就是假设起始点和终止点速度为 0,此时也是直接联立方程式就好了。这里的 \(t_b\) 是我们自己设计的,决定了加速度是多少。
Genera Linear Function
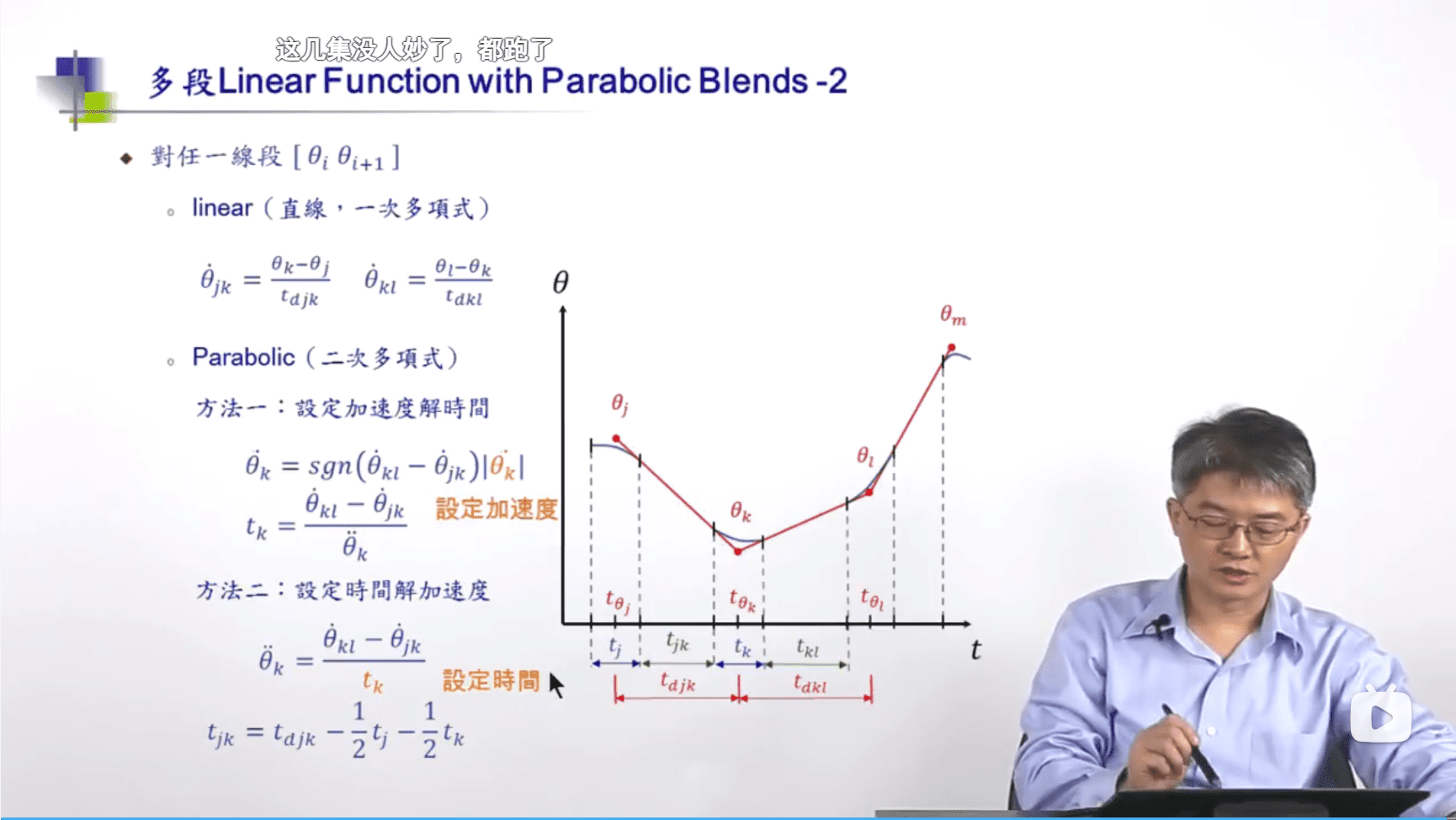
还是一样,扩展到所有点,6-3 主要负责将这一部分。
其实没啥,我们只要设计好要求的加速度(或者设计加速用的时间,本质上一样),然后就正常求解方程。
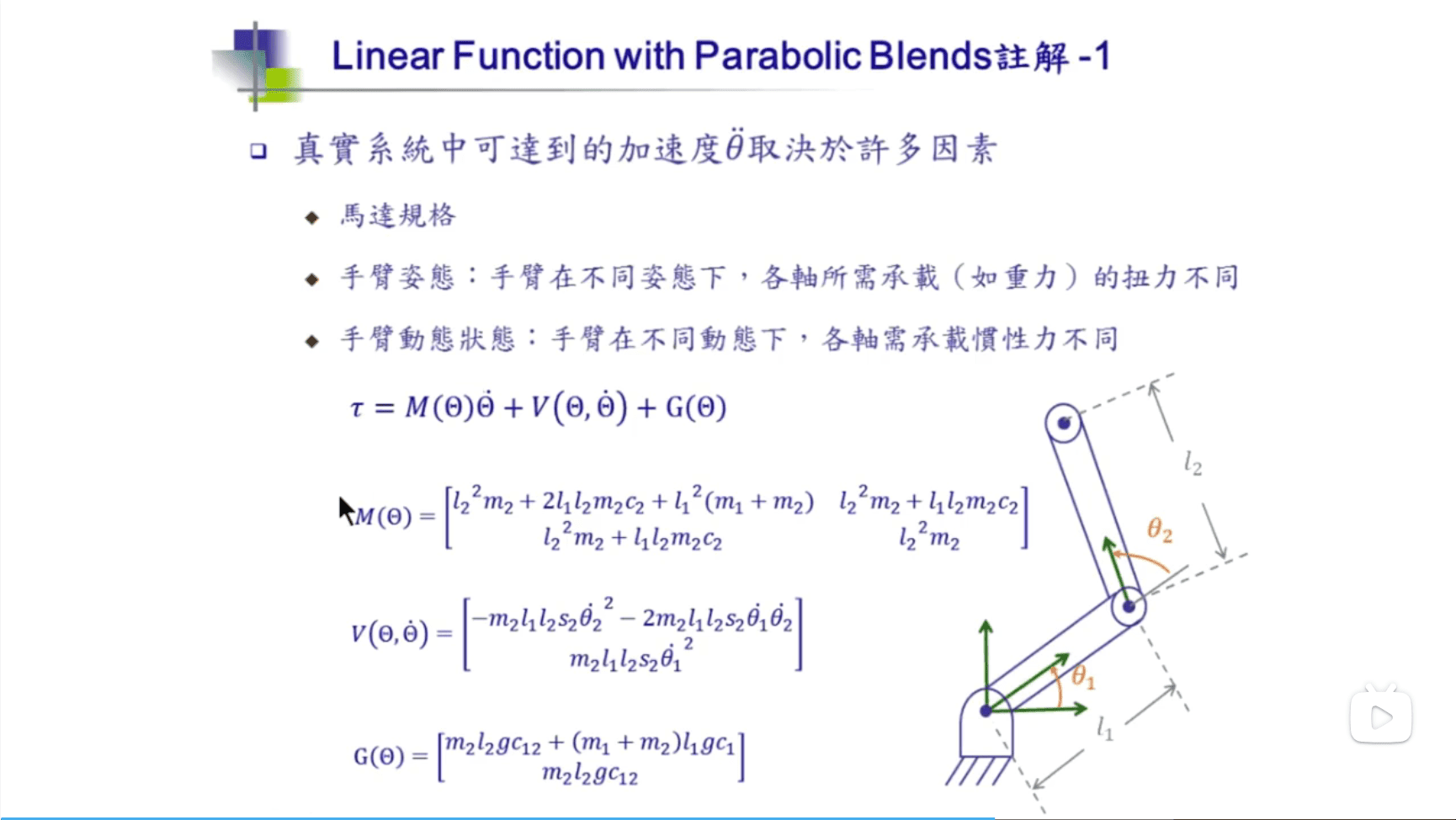
注意点 1, 6-3-01 小节说的,不要认为每个关节的加速度都一样,我们要根据关节各自不同的情况给每个关节设计不同的加速度。而且实际情况如下图,还有可能会不同姿态下给同一个关节设置不同的加速度,因为不同姿态下同一个关节受力也不一样。
注意点 2,其实之前讲解的时候,规划的轨迹没有落在要求的点上面,而是在其附近。如果一定要强求这样,可以把 via point(也就是要求的点)转成其附近的两个点,如下图所示,红色点转成橘色点,总之是上 via point 落在轨迹规划中的直线部分,而不是加速减速的曲线部分。

实际情况的限制
然后 6-4 讲了实际情况其实有的轨迹是没有办法行动的,一定要确认一下。举的三个例子很好:
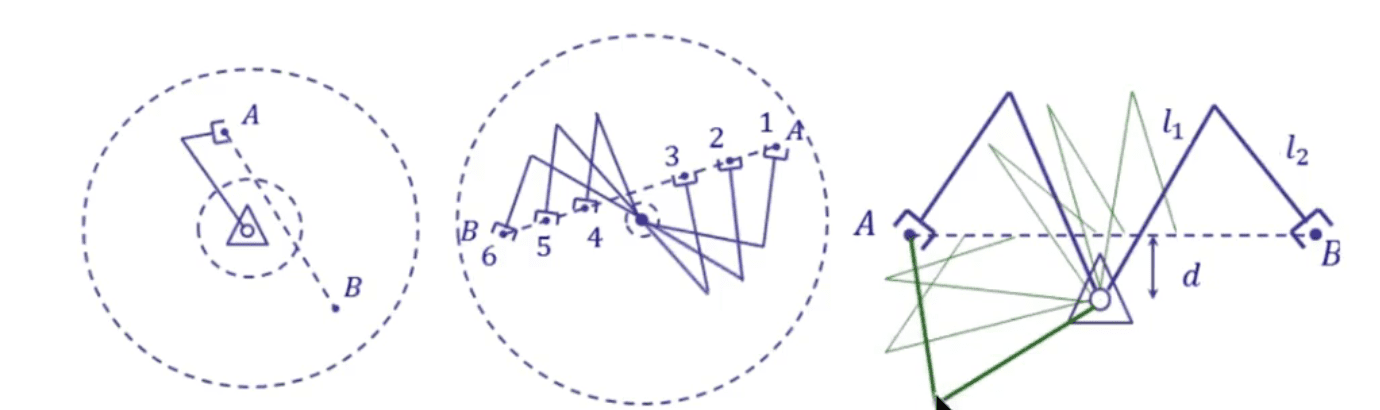
- 第一个,内圈表示机械臂末端无法到达。此时我们规划直线,其实这是一条不可能走成功的线。
- 第二个,从 1 到 6,虽然规划直线可以走通,但实际情况会看到这个线并不好,关节发生了很大的扭转。
- 第三个,从 B 到 A,虽然末端位置同样是 A,如果是机械臂是蓝色的线的姿态,无法走通;只有机械臂姿态是绿色线的姿态,这个时候,才能走通,机械臂此时按照绿色的几个示意去变化。
习题
6-5 就是讲了例子,和上一章一样的机械臂,这里直接给出动画:
轨迹规划实例
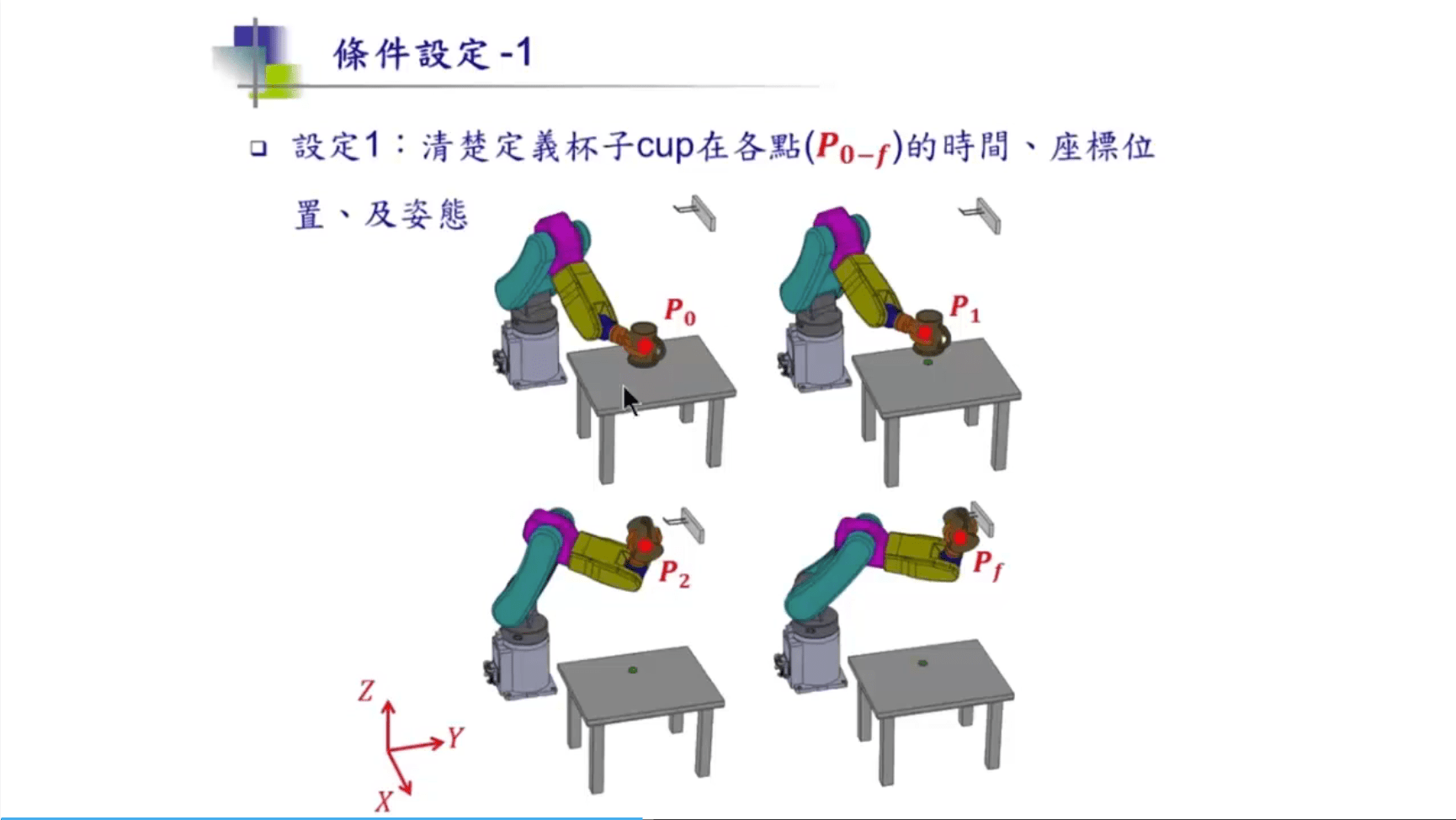
第七章,就是专门讲了例子。依然是拿水杯的例子,简单但经典。
按照 Cartesian Space 的思路:
- 首先进行轨迹规划,从几个点去得到机械臂末端的运动轨迹。
- 得到各个轨迹中的点,使用逆向运动学,反推得到各个关节的角度。
- 关节按照计算的不同时刻的角度,进行运动。
按照 Joint Space 的思路:
- 首先使用逆向运动学,得到几个设计点的时候,各个关节的角度。
- 按照轨迹规划的方法,每个关节去做角度规划。
- 关节按照计算的不同时刻的角度,进行运动。
可以看到 Joint-Space 比较简单,计算量也小,只要做设计点的时候逆向运动学;而 Catesian-Space 是根据设计点去规划轨迹,得到更多的点,每个点都要做逆向运动学。
但是实际用的比较少。虽然容易控制关节,但末端轨迹可能很怪。比如抓水杯:
- 姿态要保持水平,杯子不能倒了
- 不要撞到桌子
- ...