边缘检测方法:EDLines
介绍一种边缘检测方法:EDLines,来自以下文章,它可以在 OpenCV 中使用,具体用法在另一篇笔记中。
- Edge drawing: a combined real-time edge and segment detector
- EDLines: A real-time line segment detector with a false detection control
之所以有两篇,是 EDLines 前面用的就是 Edge drawing,其实都是一个作者写的。 Edge drawing 的详细记录在 另一篇笔记 中。
总体流程
流程一:先用 Edge Drawing 得到了一些连接的像素链; 流程二:对每个像素链进行分解,得到各个线段; 流程三:对线段进行验证,不符要求就丢弃。
流程一:使用 Edge Drawing 初步检测
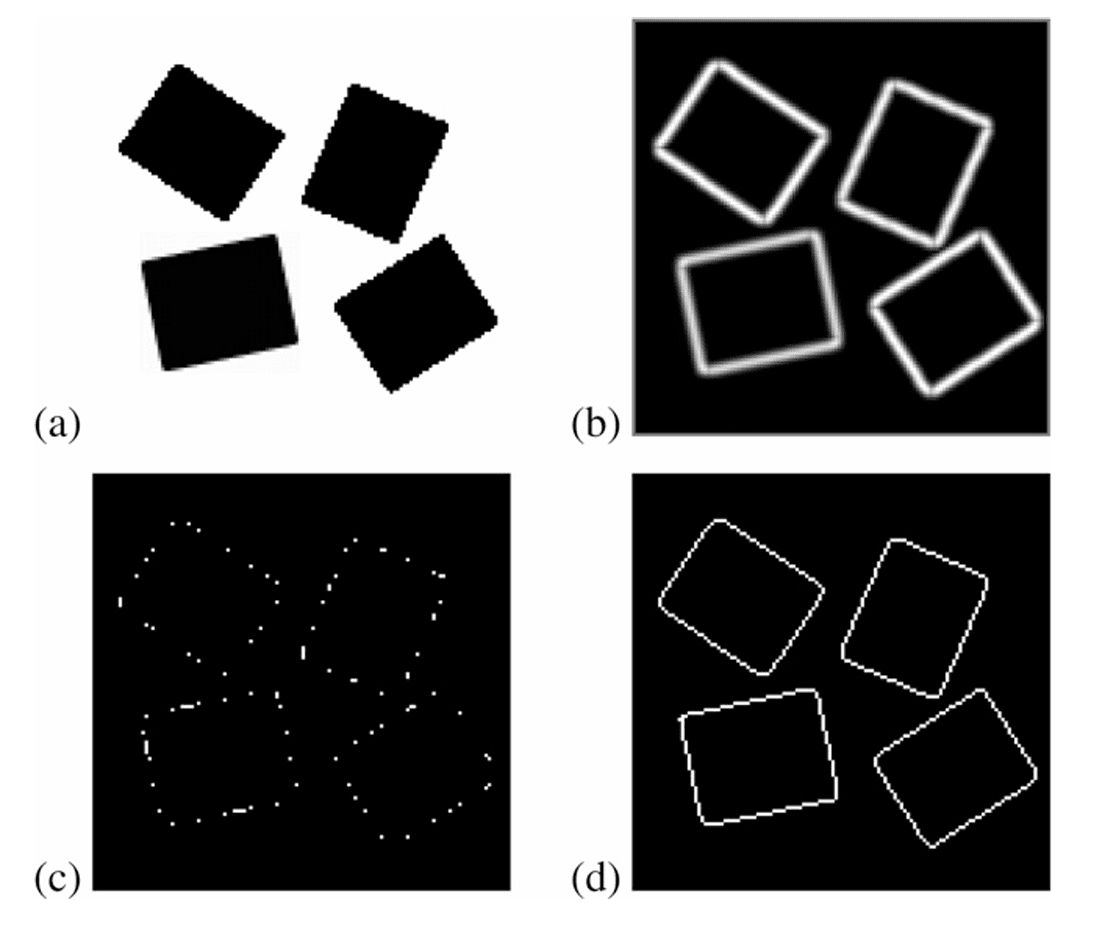
Edge Drawing 的详细介绍在 另一篇笔记 中。下图是 Edge Drawing 各个步骤的临时结果,Edge Drawging 更侧重于边缘检测,他不会考虑直线的问题,以这张图为例,最后 Edge Drawing 会得到四条连接的像素链,即每个矩形对应一个。
参数说明
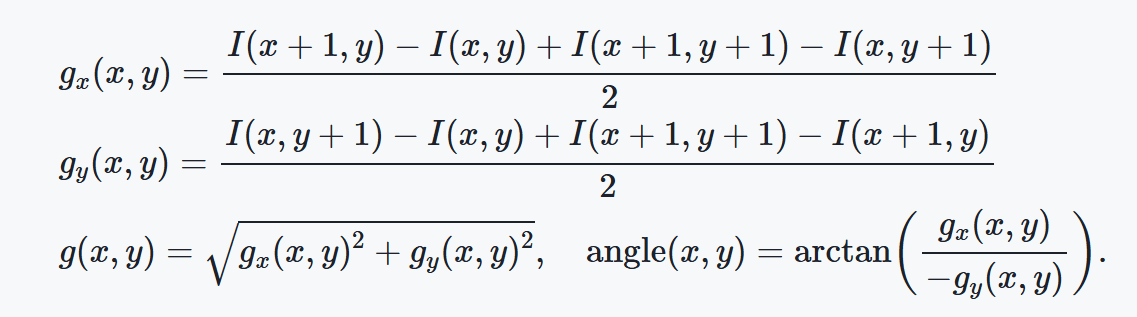
这里和 Edge Drawing 计算方式或默认值有轻微不同。首先梯度的大小计算方式不同,方向计算也不同,ED 用的 Sobel,EDLines 这里简化一些:
ED 有一个梯度阈值 gradient_thresh,小于该阈值的点不考虑:ED 使用 36,EDLines 使用 \(2/\sin(22.5) = 5.22\),这里差这么多也是因为梯度计算方式有点不同。
ED 求解锚点(具体看 ED 方法),有一个 anchor_thresh 参数,表示某个点梯度值比周围点的梯度大多少才可以。这是一个经验参数,ED 用的 4,EDLines 论文中说实验结果显示 3 最好。
ED 求解锚点(具体看 ED 方法),还有一个 anchor_interval 参数,表示找锚点时遍历行列的步长,即决定了找锚点的扫描细节程度。ED 用的 4,EDLines 用的 1,即遍历所有的点。
流程二:对像素链进行拆解
下面就要开始对像素链拆分了,比如上面的图,一个矩形对应一个像素链,这条像素链会被拆为四条边。其流程如下:
1. 首先假设遍历到点 \(p\),检测以它为起点的一个最小长度的链条,用最小二乘法拟合直线,然后检测链条和直线之间的误差是否符合要求。如果不符合,说明后面再加多少点都没用了,点 \(p\) 应该被丢了,去看看点 \(p+1\) 开始行不行。
2. 如果点 \(p\) 符合要求,那么就继续增加点,即尝试延升,同样用最小二乘法拟合,直到失败为止。
经过实验,链条和最小二乘法拟合的直线的误差选择为一个像素。下面是代码展示,来自于该博客,感谢作者。
LineFit(Pixel *pixelChain, int noPixels){
double lineFitError = INFINITY; // 目前的直线拟合误差
LineEquation lineEquation; // y = ax + b 或者 x = ay + b
while (noPixels > MIN_LINE_LENGTH){
LeastSquaresLineFit(pixelChain, MIN_LINE_LENGTH, &lineEquation, &lineFitError);
if (lineFitError <= 1.0) break; // OK. 一个初始线段被检测到。
pixelChain ++; //跳过第一个像素并尝试剩下的像素
noPixels–; // 少一个像素
}
if (lineFitError > 1.0) return; //没有初始线段, Done.
//一个初始线段被检测到,尝试延展这个线段。
int lineLen = MIN_LINE_LENGTH;
while (lineLen < noPixels){
double d = ComputePointDistance2Line(lineEquation,
pixelChain[lineLen]);
if (d > 1.0) break;
lineLen++;
}
// 当前线段结束。计算最后的直线方程并输出。
LeastSquaresLineFit(pixelChain, lineLen, &lineEquation);
Output(lineEquation);
// 从剩余像素中提取线段
LineFit(pixelChain + lineLen, noPixels-lineLen);
}
流程三:判断线段是否可以作为最终直线
作者用了一个叫做 NFA 的指标。NFA(the Number of False Alarms),假阳性率,这个指标在另一个方法 LSD 中也用到。
但两个方法有点区别,LSD 的公式是这样的
但 EDLines 的公式是这样的
其中 \(N\) 和 \(M\) 是图片的大小,\(n\) 是当前矩形的像素数量,\(p\) 叫做精确度,两个方法的默认值都设为 ⅛,\(k\) 是符合条件的像素点数量,而这个条件阈值就是 \(p\pi\)。
多说一下精确度 \(p\),其最后决定了方向的误差。比如论文中 \(p = \pi/8\),说明此时检查像素是否符合条件时,检测该像素的梯度方向和拟合直线的方向差不能超过 \(\pi/8\)。
比较两个公式,其实就是前面第一项不同,EDLines 假设了 \(M = N\),但指数一个是 5 一个是 4,很奇怪,暂时不细究了。EDLines 论文说这一项代表图像潜在线段的个数,但 LSD 论文中没有提到。
最终判断 \(NFA(r) < \epsilon\),如果满足则认为当前线段是直线,论文中选择 \(\epsilon = 1\),LSD 也是如此,所以其实这两个方法判断直线的方式基本一样的。
参考
1. https://www.cnblogs.com/eleanor/p/16167058.html