GraphCut 算法
图像分割,乃至图像处理中一篇经典的论文:
Interactive graph cuts for optimal boundary and region segmentation of objects in N-D images
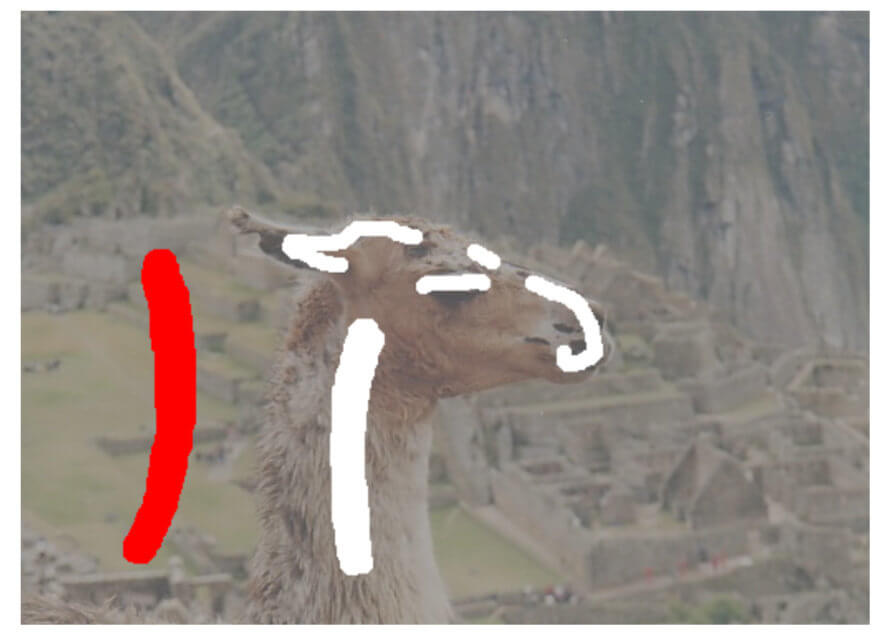
一个前提,需要用户先指定一些前景和背景:
图的构建
首先图片按照四联通转成一张图,然后比较特殊的一点:还需要加两个特殊点,叫做终端节点。起始的时候这两个特殊点和图上所有像素点都相连。
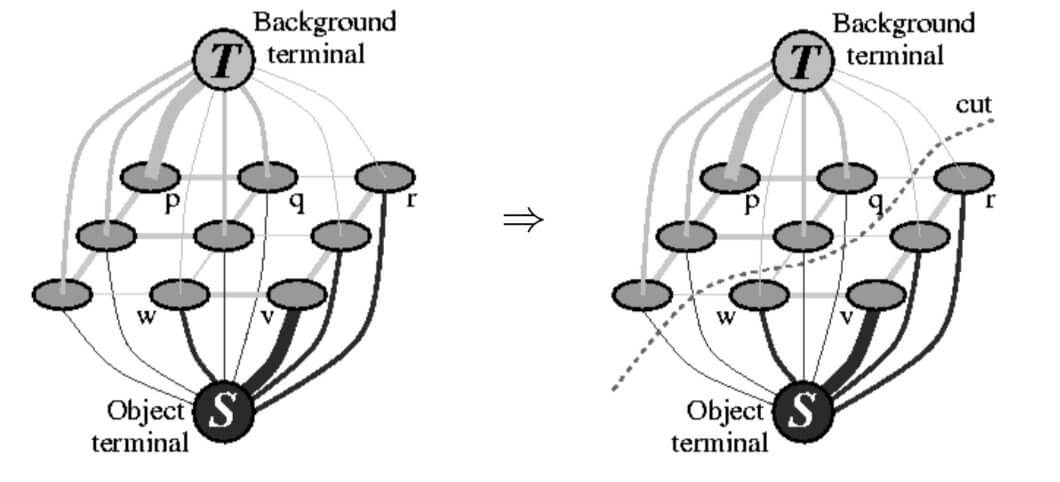
然后这样就能转换为一个图割问题,用来最大流-最小割方法(几年前算法课的死去回忆再一次攻击我...),这个就偏程序算法层了,不谈。后面主要讲图割中重要的损耗在本论文中是什么样的。
符号定义
像素点我们称作 \(p\),背景叫做 bkg,前景叫做 obj。
我们把 \(A_p\) 定义为像素点 \(p\) 的标签,那么 \(A_p\) 只能是 obj 或者 bkg。很明显,每个像素只有两种可能性。我们把 \(A\) 定义为所有像素点标签的集合,即 \(A = (A_1, ..., A_p, ..., A_{|P|})\)。也可以理解它为一种分割方法。
一定要谨记 \(A\) 是所有像素点标签的集合,我们最终的目标就是寻找正确的 \(A\),即此时总损耗最小。
损耗函数计算
总损耗函数 \(E(A)\) 在本文中的计算公式为:
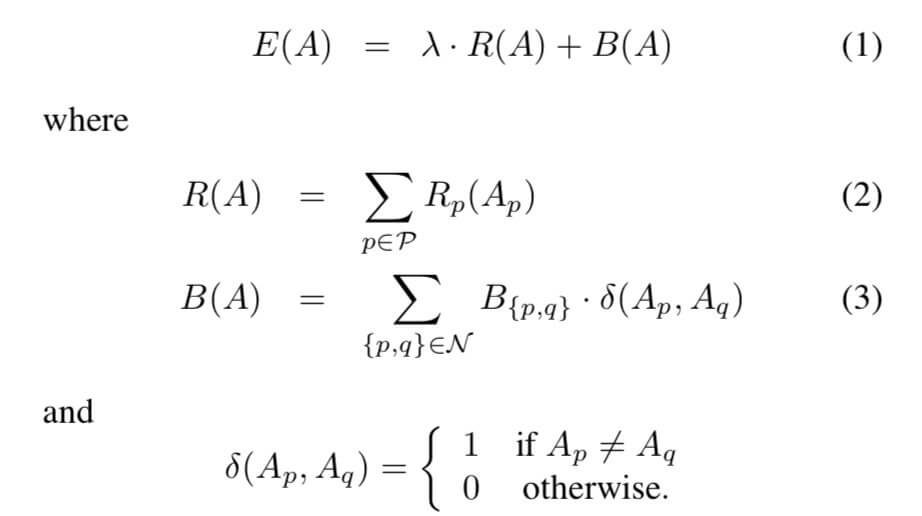
其中 \(\lambda\) 是平衡参数,下面介绍 \(R(A)\) 和 \(B(A)\) 的计算。
区域项 \(R(A)\)
从公式很简单看出,\(R(A)\) 是每一个像素点的 cost 总和。每个像素点的 cost 其实就是像素点 \(p\) 被归为 \(obj\) 的 cost 或者被归为 \(bkg\) 的 cost。
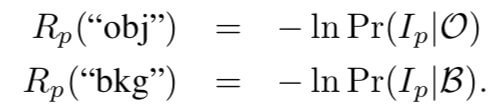
而每个点这种的 cost 是如何算的呢,这就需要用到用户在最开始指定的一些前景和背景。方法就是按照像素值去计算出前景和背景的各自灰度直方图。
现在,假设有像素点 \(p\),其像素值为 \(I_p\),如果最后它被归为前景,那么根据直方图计算出概率为 \(Pr(I_p|O)\),如果属于背景,计算出属于背景的概率为 \(Pr(I_p|B)\)。如果是已经是在用户指定出的前景或背景中,则跳过这个点。
边界项 \(B(A)\)
公式中 \(B(A)\) 的 \(B(p, q)\) 计算方式为:

其实就是做一个高斯分布,根据像素值差异给出不同的权重。