常见检测:人脸识别
来自本人笔记: https://github.com/masterAllen/LearnOpenCV/blob/main/docs/3.7.md
参考 OpenCV 的 turtoial,本文相当于摘抄。
Face Recognition
人脸识别对于人类太简单了,但对于计算机而言一直都是非常有挑战的事情。面部识别既有内部特征(眼睛、鼻子、嘴巴)又有外部特征(头型、发际线),有研究表明,脑拥有专门对场景中特定局部特征做出反应的神经细胞,比如线条、边缘、角度或运动。由于我们不是将世界看作分散的碎片,我们的视觉皮层必须以某种方式将不同的信息源结合起来,形成有用的模式。自动面部识别就是从图像中提取这些有意义的特征,将它们放入有用的表示中,并对其进行某种分类。
最早的人脸识别是基于 geometric features,标记处眼睛、耳朵、鼻子等位置,构建特征向量(点之间距离、角度...)。通过计算特征向量之间的欧式距离来识别。其实这个方法有一个好处:对光照有鲁棒性。但是缺点很明显,就是标记这些点本身就有难度,并且是标记非常精确。有研究表明仅靠 geometric features 并不能面部识别。
然后有了 Eigenface 方法:从高维图像空间中的脸降维到一个低维表示,在低维进行分类比较容易。找到低维子空间是通过 PCA 主成分分析来做的,其识别具有最大方差的轴。这是经典方法了,有一个缺点:没有考虑任何类别标签。有的时候,最大方差是由外部来源产生的,比如光线。此时具有最大方差的轴并不能帮我们分类。于是有改进方法,用了 LDA 方法来做,LDA 比 PCA 在基本思想不同的是在最小化类别内部的方差的同时,最大化类别之间的方差。
此外近些年来有许多方法进行了各种局部特征提取。即只描述图像的局部区域,提取的特征对部分遮挡、照明和小样本大小更具有鲁棒性。用于局部特征提取的算法包括 Gabor Wavelets, Discrete Cosinus Transform, Local Binary Patterns。提取局部特征后,需要仍然要保持空间信息,即比如一张脸提取了局部特征产生的图,最好也是眼睛在上面,嘴巴在下面。
Face Database
原文推荐了三个数据集:AT&T、Yale Facedatbase A、Extended Yale Facedatabase B;我这里就直接下第一个,链接在此,其包含了 s1 到 s40 目录,每个目录代表一个人,每个目录下面有一些 pgm 文件,这就是一种图片格式,OpenCV 可以直接读取。
EigenFaces 和 FisherFace
这用有两种方法,具体原理不在这里展开,网上有许多资料,因此直接看代码即可,很简单的调用:
# 读取 ATT 数据集,注意要转为灰度图
images, labels = [], []
dirnames = [x for x in os.listdir('./image/faces') if x[0]=='s']
for onedir in dirnames:
filenames = [y for y in os.listdir(f'./image/faces/{onedir}')]
for onefile in filenames:
images.append(cv2.imread(f'./image/faces/{onedir}/{onefile}', cv2.IMREAD_GRAYSCALE))
labels.append(int(onedir[1:]))
images, labels = np.array(images), np.array(labels)
rows, cols = images[0].shape[0:2]
train_images, train_labels = images[0:-1], labels[0:-1]
test_images, test_labels = images[-1:], labels[-1:]
model0 = cv2.face.EigenFaceRecognizer.create()
model1 = cv2.face.FisherFaceRecognizer.create()
model0.train(train_images, train_labels)
model1.train(train_images, train_labels)
predict_label, predict_confidence = model0.predict(test_images[0])
print(f'Actual: {test_labels[0]}, Predict: {predict_label}')
predict_label, predict_confidence = model1.predict(test_images[0])
print(f'Actual: {test_labels[0]}, Predict: {predict_label}')
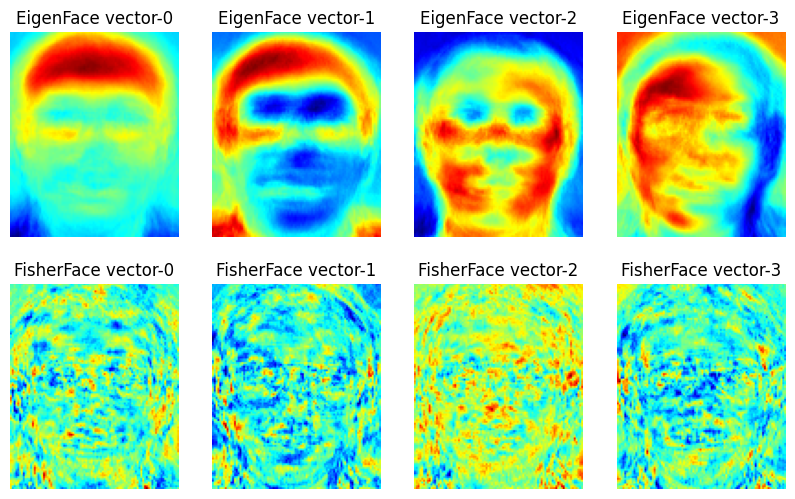
然后说一下两个方法的区别,EigenFace 如第一节所说,对光照很明显,FisherFace 就是改进,下面代码就是把他们的主要特征向量输出一下。其中特征向量是一幅图,所以代码中把灰度转为了伪彩色,越红表示越大。可看到 EigenFace 很容易受光照影响,有的是左半脸较红,有的是头顶,而这可能因为训练图片左半边光照更多;FisherFace 相对好一点。需要注意:只在光线良好的图片上学习 Fisherfaces,然后在光线不好的场景中识别,结果可能会差,因为没有机会学习光照。
# 可视化显示 EigenFace 和 FisherFace 的前几个特征向量,灰度转为了伪彩色,越红表示越大
# 可看到 EigenFace 很容易受光照影响,有的是左半脸较红,有的是头顶,而这可能因为训练图片左半边光照更多;FisherFace 相对好一点
# 需要注意:只在光线良好的图片上学习 Fisherfaces,然后在光线不好的场景中识别,结果可能会差,因为没有机会学习光照
result = []
# Here is how to get the eigenvalues, eigenvectors of this Eigenfaces model:
eigenvalues0 = model0.getEigenValues()
eigenvectors0 = model0.getEigenVectors()
# Display or save the Eigenfaces:
for idx in range(eigenvectors0.shape[1]):
if idx > 3:
break
img = to_8bit(eigenvectors0[:, idx].reshape(rows, cols))
# 用伪彩色表示灰度图,这样效果更明显一点,越红就越大
img = cv2.applyColorMap(img, cv2.COLORMAP_JET)
result.append((f'EigenFace vector-{idx}', img))
eigenvalues1 = model1.getEigenValues()
eigenvectors1 = model1.getEigenVectors()
# Display or save the Eigenfaces:
for idx in range(eigenvectors1.shape[1]):
if idx > 3:
break
img = to_8bit(eigenvectors1[:, idx].reshape(rows, cols))
img = cv2.applyColorMap(img, cv2.COLORMAP_JET)
result.append((f'FisherFace vector-{idx}', img))
show_images(result)
结果:
Local Binary Patterns Histograms
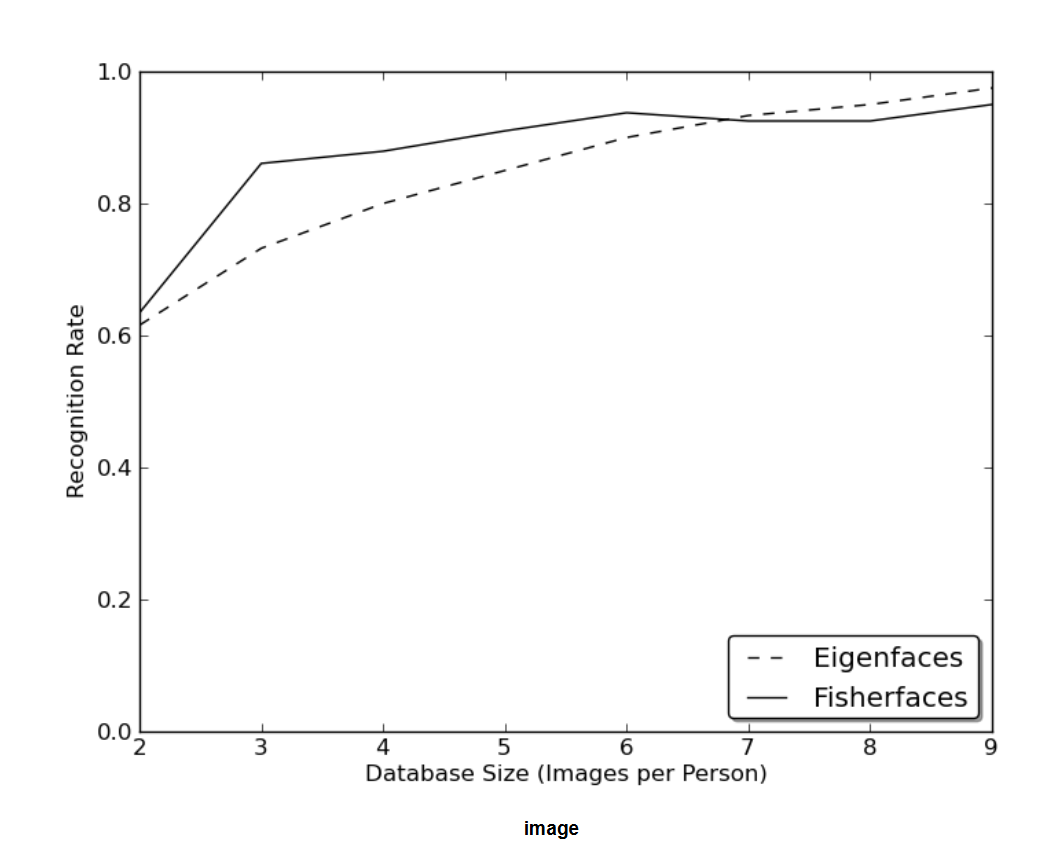
上面方法还是不错的,但现实生活并不完美。无法保证图像中有完美的光线设置,或者一个人有10张不同的图像。如果每个人只有一张图像怎么办?此时对子空间的协方差估计可能极其错误,识别也会如此。以下是AT&T人脸数据库上面两个方法的 Rank-1 识别率,这是一个相当简单的图像数据库,但结果显示必须要要 8 张左右才可以有好结果。也有文章进行了更详细的分析,分析了小样本时的情况和训练对策。
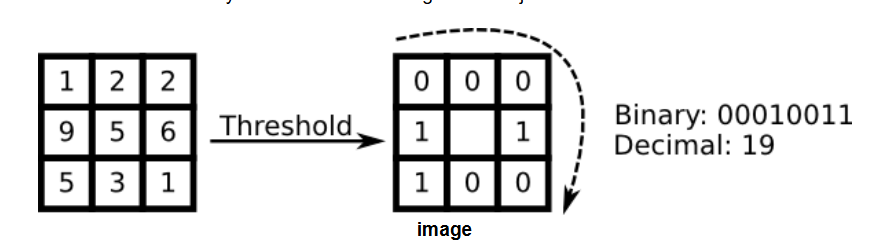
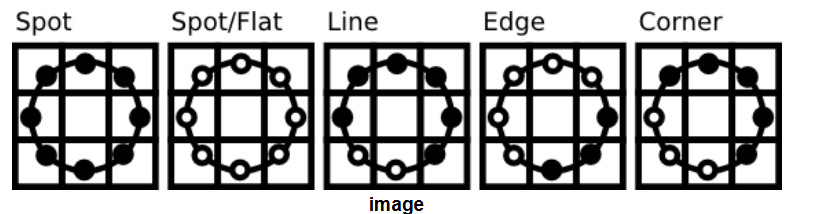
所以第一节提到的从图像中提取局部特征是很有作用的。提取的局部特征隐含地具有低维性,但局部特征要由鲁班性,就像 SIFT 特征点一样,起码要面对图像中的尺度、平移或旋转等问题。本文介绍 LBP(Local Binary Patterns)方法,其起源于 2D 纹理分析。LBP 的基本思想是通过比较每个像素与其邻域来总结图像中的局部结构。对于某个中心像素,如果其邻域像素小于它,则用 0 表示,反之为 1,最后组成一个二进制数;滑动窗口遍历整个图片,每个像素都有一个值:
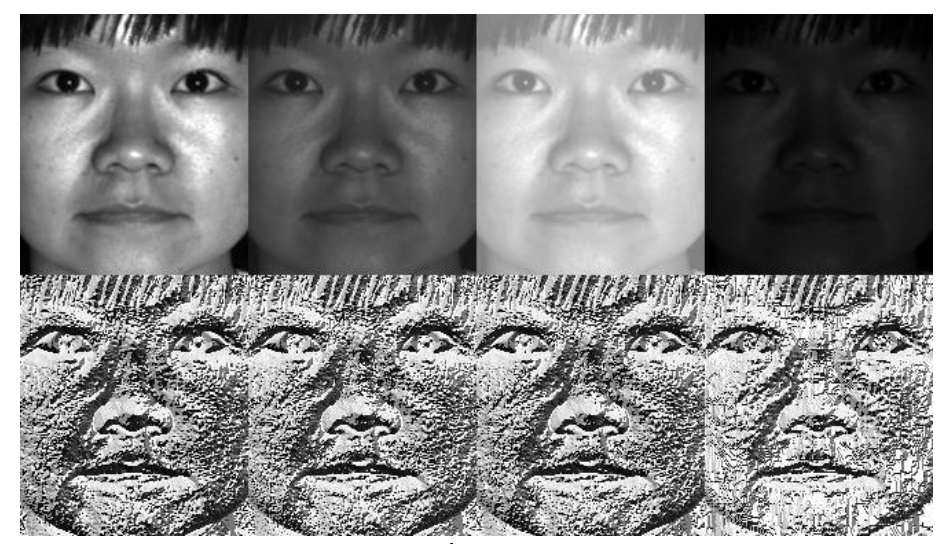
从定义上看,LBP 对单调灰度变换具有鲁棒性。如下图所示的实验结果,上面是人为改变像素值的图片,下面是 LBP 后的结果,像素值虽然被人为单调变化了,但 LBP 的结果很有鲁棒性:
LBP 能够在纹理分类方面与最先进的结果竞争。在该操作符发布后不久,人们注意到固定的邻域无法编码不同尺度的细节。因此,LBP 顺理成章被扩展了,注意的是领域没有被扩展成了更大的正方形,而是半径可设置的圆,只考虑圆上不考虑内部。其中如果算出M某个圆上的点的位置不是整数,那就用 bilinear 插值去计算那个点:
提取特征后,有研究将 LBP 后的图片划分为局部区域,并从每个区域提取直方图。然后通过连接(而不是合并)局部直方图来获得空间增强的特征向量。这些直方图被称为 Local Binary Patterns Histograms。代码如下:
model = cv2.face.LBPHFaceRecognizer.create()
model.train(images, labels)
print('Predict:', model.predict(test_images[0]))
# print(model.getRadius(), model.getNeighbors(), model.getGridX(), model.getGridY(), model.getThreshold())
histograms = model.getHistograms()
# len(histograms) 就是划分的区域总数,每个区域都会统计直方图
print(histograms[0].shape, len(histograms))