HOG 特征
来自本人笔记: https://github.com/masterAllen/LearnOpenCV/blob/main/docs/2.3.md
一个比较特别的特征,简单、古老但是却很有用。通过梯度+直方图的方式,HoG 结合 SVM 分类器非常经典的图像识别应用,非常适合行人检测。
步骤说明
1. 预处理图像
通常需要将训练图像块 resize 到 128*64 大小,其实主要是这个尺寸比例比较适合行人检测,而这是 HOG 最常用的领域;如果检测车子等宽体,那肯定要换个大小。(参考)
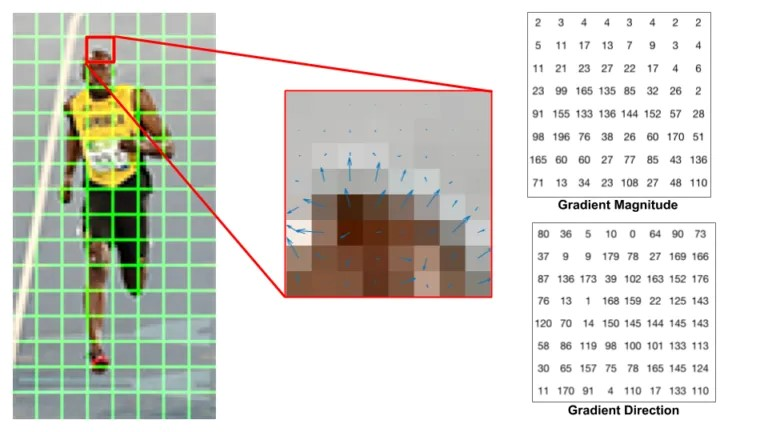
2. 计算梯度
计算图像的梯度,包括 x 方向和 y 方向的梯度,然后转成梯度幅值和梯度方向。
3. 计算梯度直方图
64*128 大小的图像,分成 8*8 的小块,每个小块计算梯度直方图。直方图的横坐标是 9 个 bin,按照 0-180 的角度划分;直方图的纵坐标是各个对应的像素梯度幅值加起来。
看下面的图就好理解了,下面这个博尔特被分为了 8x8 的绿色小块,我们专注其中一个小块,有它各个像素的梯度幅值和方向:
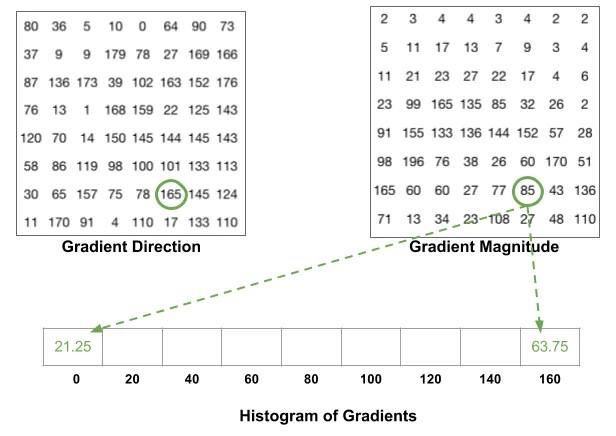
然后根据每个像素的梯度方向作为横坐标依据,梯度幅值加到直方图纵坐标中;注意是要按比例划分,而不是落入哪个区间就全加入到那个区间中:
4. 归一化(可选)
为了减小光照的影响(比如同样边缘的梯度幅值,强光下会比弱光下大)。将每个小块的直方图归一化,归一化公式如下:
其中 c 是一个很小的数,防止分母为 0。
5. 特征拼接
64x128 分割 8x8,一共 8x16 个小块,每个小块有 9 个 bin。按照 2x2 的滑块去遍历(现在最小单位是 8x8 的小块了),每次遍历将 2x2 的小块直方图拼接成 36(4x9) 维向量,这样相当于滑动窗口滑出了 7x15 的区域,最终特征向量是 7x15x36=3780 维。(GIF图) 其中这个 2x2 的滑块叫做 block。
{kind=link}
可视化 HOG 特征
搜索 HOG 时,经常会看到一些结果图:
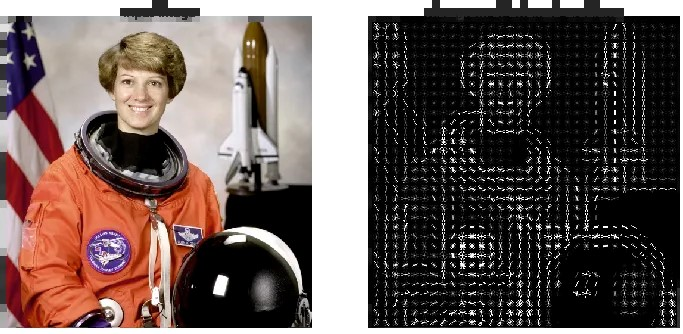
这个其实不是单纯就根据 HOG 特征的值画出像素大小。现在相当于是 8x8 的小块中有 9x1 的值,每个值代表一个方向的强度,所以就按照类似星形结构,哪个方向大那就把那个方向的画的长和深,最终将这个 9x1 的值大致表现出不同方向的强度。
代码实现
cv::HOGDescriptor::HOGDescriptor(
Size _winSize, Size _blockSize, Size _blockStride, Size _cellSize,
int _nbins, int _derivAperture = 1, double _winSigma = -1,
HOGDescriptor::HistogramNormType _histogramNormType = HOGDescriptor::L2Hys,
double _L2HysThreshold = 0.2,
bool _gammaCorrection = false,
int _nlevels = HOGDescriptor::DEFAULT_NLEVELS,
bool _signedGradient = false
)
这是一个类,里面有种种方法,用的时候细查文档,里面貌似直接带了和 SVM 结合的函数:https://docs.opencv.org/4.x/d5/d33/structcv_1_1HOGDescriptor.html
- winSize: 图片大小,默认是(64,128)
- cellSize: 每个单元格的大小,即所说的小块,默认是(8,8)
- blockSize: 每个 block 的大小,即最后第五步中所说的按照2x2小块进行滑动窗口,这个窗口的大小。默认是(16,16)
- blockStride: 每个 block 的步长,即第五步滑动窗口每次滑动多长,很显然一定要是 cell 的大小倍数。默认是(8,8)
- nbins: 每个单元格的直方图中的 bin 的数量,默认是 9
- derivAperture: 求梯度时候的算子大小,默认即可
- winSigma: 高斯窗口的标准差,默认即可。在计算直方图之前,对块边缘附近的像素进行平滑,可以提高 HOG 算法的性能,本质上去除噪声。
- histogramNormType: 归一化类型,默认是 L2Hys,即第四步那个公式
- L2HysThreshold: L2-Hys 归一化类型的阈值,即规定每个bin不能超过多少,超过就按照这个阈值来做
- gammaCorrection: 是否进行 gamma 校正,默认是 false
- nlevels: 图像金字塔的层数,默认是 HOGDescriptor::DEFAULT_NLEVELS
再细节将一个重要函数,detectMultiScale,这个函数即最终的检测,里面参数挺重要的,但这里就讲其中几个,原文来自这篇文章:
- winStride=(4,4): window 与 window 之间的起始位置要间距多少(x和y方向)。间距越大就只有较少的 window 使用 HOG 寻找特征,程序执行速度就会较快但成效较差; 小则反之
- padding=(8,8): 在使用 HOG 寻找特征之前,会先在周围贴 0,一般而言最好加一些
- scale=1.05: 一样,越小那么速度慢效果好;反之亦然
- 该函数经常和 NMS(即非极大值抑制,去除重叠框的)配合使用
具体别的函数就不讲了,如果哪天需要用到 HOG 再细节看吧。
# opencv HOG 特征计算
img_gray = cv2.cvtColor(cv2.imread('demo.png'), cv2.COLOR_BGR2GRAY)
# Specify the parameters for our HOG descriptor
win_size = img_gray.shape
cell_size = (8, 8)
block_size = (16, 16)
block_stride = (8, 8)
num_bins = 9
# Set the parameters of the HOG descriptor using the variables defined above
hog = cv2.HOGDescriptor(win_size, block_size, block_stride, cell_size, num_bins)
# Compute the HOG Descriptor for the gray scale image
hog_descriptor = hog.compute(img_gray)
# opencv的 默认的 hog+svm行人检测器
hog.setSVMDetector(cv2.HOGDescriptor.getDefaultPeopleDetector())
capture = cv2.VideoCapture(cv2.samples.findFileOrKeep('./code/video/vtest.avi'))
while True:
ret, frame = capture.read()
# Detect people in the image,这个函数决定了检测情况,尤其是 winStride 和 scale 参数
(rects, weights) = hog.detectMultiScale(frame, winStride=(4, 4), padding=(8, 8), scale=1.05)
for (y, x, w, h) in rects:
cv2.rectangle(frame, (y, x), (y + w, x + h), (0, 255, 0), 2)
cv2.imshow("hog-detector", frame)
cv2.waitKey(1)
还有一个 test_hog_default.py 文件,里面包含了检测之后用 NMS 去除重叠框的代码。