轮廓匹配
来自本人笔记: https://github.com/masterAllen/LearnOpenCV/blob/main/docs/1.9.md
轮廓匹配的方法比较多,一个是 main module 的 matchShapes 方法,这个是用的是形状的 HuMoments;还有一个 shape 模块是专门做这个的,用的是其他方法;还有一个是 ximgproc 模块里面的 transformFD,它使用傅里叶描述子来做的。
matchShapes
matchShapes 很简单,cv.matchShapes(contour1, contour2, method, parameter)。contour 参数要求是一个轮廓,即 (n, 1, 2) 或 (1, n, 2) 大小的 ndarray,两种形状都可以,结果是一样的;method 如下图所示,从图上也能看出这是通过 HuMoments 来进行匹配的;parameter 是无用参数,固定为 0。需要注意的是,它适用于旋转但不适用于缩放。
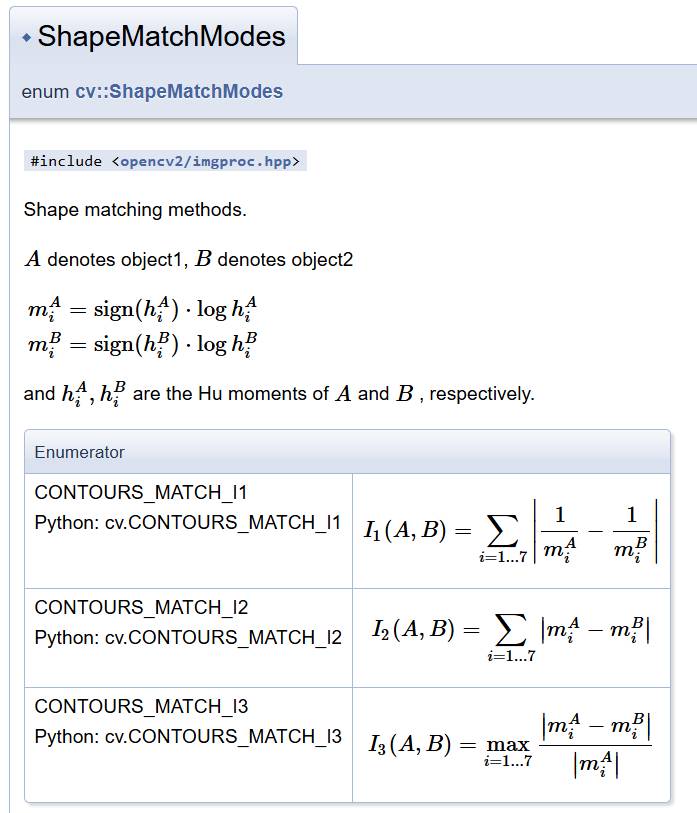
返回值是相似程度,越小表示越可能。
ximgproc.transformFD
ximgproc Fourier Descriptors 的方法,用的是傅里叶描述子,直接看代码即可
img1 = cv2.imread('./image/shape/13.png', -1)
contours1, _ = cv2.findContours(img1, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
img2 = cv2.imread('./image/shape/14.png', -1)
contours2, _ = cv2.findContours(img2, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
# sampling contour we want 256 points
fit = cv2.ximgproc.createContourFitting(1024,16)
fit.setFDSize(16)
cs1 = cv2.ximgproc.contourSampling(contours1[0].reshape((-1, 1, 2)), 256)
cs2 = cv2.ximgproc.contourSampling(contours2[0].reshape((-1, 1, 2)), 256)
alphaPhiST, _ = fit.estimateTransformation(cs1, cs2)
out_shape = cv2.ximgproc.transformFD(cs1, alphaPhiST, fdContour=False)
show_images([
('img1', draw_points(img1, contours1[0])),
('img2', draw_points(img2, contours2[0])),
('Use Fourier Descriptors', draw_points(img2, out_shape)),
])
shape 模块
shape 模块是专门用于比较两个轮廓的,他的类可以分为三个部分:
# class cv::ShapeTransformer
# class cv::AffineTransformer
# class cv::ThinPlateSplineShapeTransformer
# class cv::HistogramCostExtractor
# class cv::ChiHistogramCostExtractor
# class cv::EMDHistogramCostExtractor
# class cv::EMDL1HistogramCostExtractor
# class cv::NormHistogramCostExtractor
# class cv::ShapeDistanceExtractor
# class cv::HausdorffDistanceExtractor
# class cv::ShapeContextDistanceExtractor
Extractor
两个 Extractor 基类都是用来计算两个轮廓的差距的,代表着两类不同方向的方法;其中 ShapeDistanceExtractor 调用 computeDistance 方法、HistogramCostExtractor 调用 buildCost 方法。
示例代码如下,详细的代码在 test_shape.ipynb 中:
'''
Shape Distance Extractor 使用说明
'''
# class cv::ShapeDistanceExtractor -> computeDistance
# class cv::HausdorffDistanceExtractor
# class cv::ShapeContextDistanceExtractor
extractor = cv2.createShapeContextDistanceExtractor()
src = cv2.imread('./image/shape/13.png', -1)
src_contours, _ = cv2.findContours(src, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
src_points = make_points(src_contours[0], n=500)
for imgname in os.listdir('./image/shape'):
now = cv2.imread(f'./image/shape/{imgname}', -1)
now_contours, _ = cv2.findContours(now, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
now_points = make_points(now_contours[0], n=500)
# 传入的必须是 (x, 1, 2) 或 (1, x, 2) 这种 shape 的 ndarray,两个 ndarray 的 x 不强制要一样
result1 = extractor.computeDistance(src_points.reshape(1, -1, 2), now_points.reshape(1, -1, 2))
result2 = extractor.computeDistance(src_points.reshape(-1, 1, 2), now_points.reshape(-1, 1, 2))
print(imgname, result1, result2)
break
ShapeTransformer
子类说明
cv::AffineTransformer,这个无需多言,就是最传统的仿射变换。
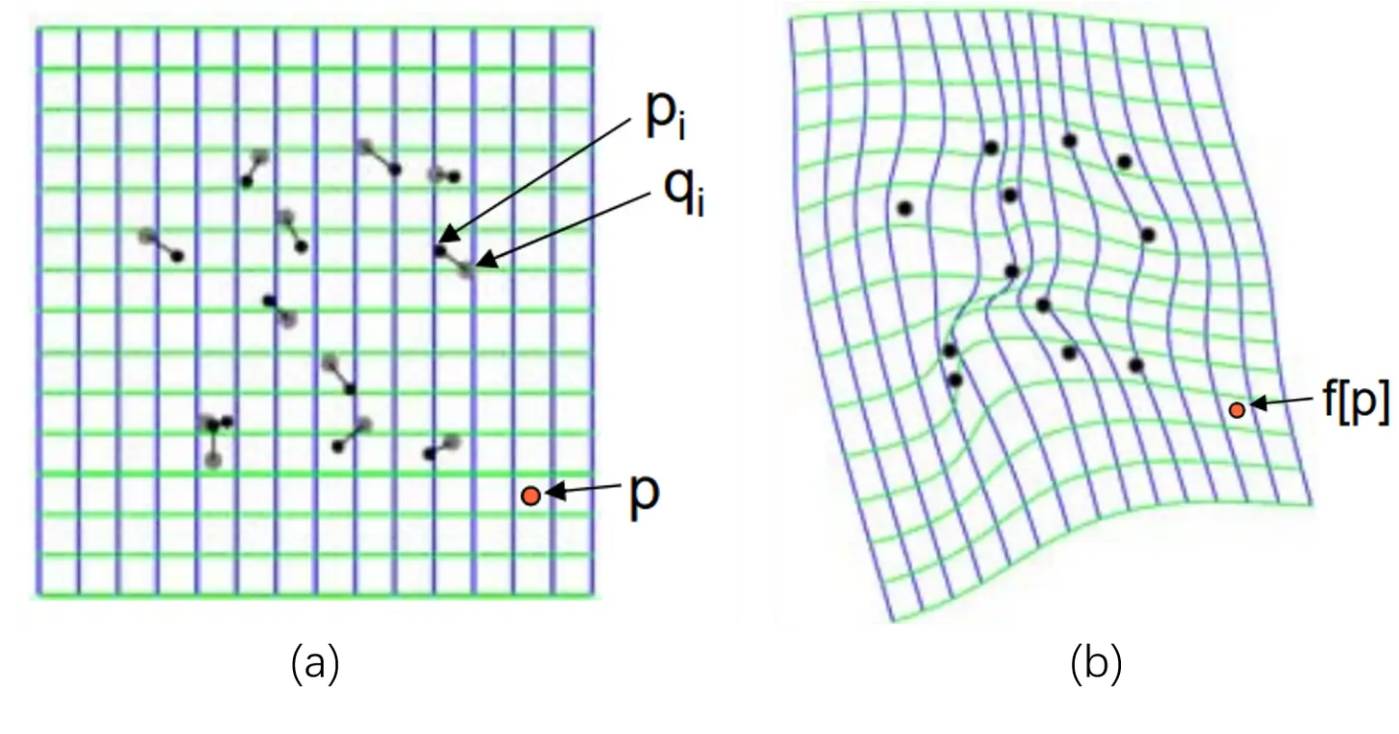
cv::ThinPlateSplineShapeTransformer,这是薄板样条插值变换,会根据每个点的前后变换进行各个点插值拟合,最终效果类似于扭曲。可以用于脸部变形,或者把一个成弧度的形状拉直便于处理(比如硬币上的中国人民银行)。如下图所示:
使用场景
ShapeTransformer 基类用于变换轮廓形状,有两种使用场景(便于讲述,假设当前有一个变量 transformer):
- 单独使用,需要调用
estimateTransformation(shape1, shape2, matches)来计算出内部的转换方式。其中 shape1 和 shape2 是 vector<point2d>,长度要一样;而 matches 则是同 vector 长度一样的列表,里面的元素是 cv2.DMatch(i,i,x),这个和普通的 DMatch 是一样的,i 表示索引,x 表示距离。一般而言用 estimate 都把 x 设为 0,即前后变换的点是对应的关系。执行 estimate 后,transformer 内部的转换方式就确定了,可以调用applyTransformation或warpImage了。 - 配合 ShapeDistanceExtractor 使用,extractor 调用
setTransformAlgorithm(transformer)。当 extractor 调用computeDistance(contour1, contour2)后,此时 transformer 内部的转换方式就确定了,就可以调用applyTransformation或者warpImage这样的方法把输入的轮廓/图片进行变换了。但是实验发现不行,所以还是要用上面第一种方法,即使用到了 computeDistance,也要在 applyTransformation 前多写一句 estimateTransformation。
关于单独使用,我还想多说几句。刚开始的时候我看到有 matches,以为是调用 SIFT 之类的特征点,然后进行匹配。但这样是不对的,要牢记 ShapeTransformer 针对的是形状,他要传入的点必须是可控的。下面通过两个例子说明:
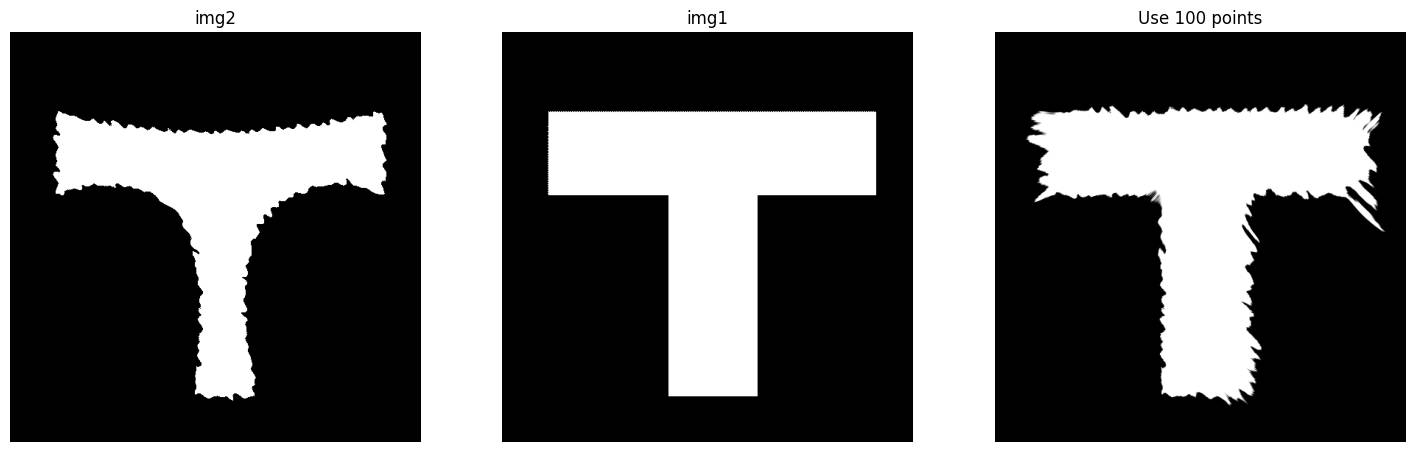
例子一,如下图,我希望 img2 变为 img1 的形状。此时是我已经正确做法是:img2 找轮廓,获取轮廓上的一些点;计算这些点应该变换为什么位置,当然由于已经有了 img1,所以只要在 img1 上找轮廓,采同样的点就可以了。
例子二,如下图,我希望把文字拉直。正确做法就是先算出一开始弯曲的文字的大致轮廓,然后计算出包住这个轮廓的矩形框,之后在弯曲的轮廓上采点后,能计算出其在矩形框上对应的点:

总而言之,本质是因为 SIFT 得到的点不可控:一方面是 SIFT 得到的点很可能不在轮廓上,即使强制在轮廓上,也很少;另一方面更重要的是我们现在的目的是为了变换轮廓,即需要精细控制两个点变换前后的位置,而不是为了去匹配两张图。比如例子一,我们通过等间距采样 100 个点达到了上面的变换效果,而采用特征点根本不知道特征点的位置,根本做不到上面的效果。
强烈建议,看一下 test_shape.ipynb 这个代码最后的两个 code 部分,看完就理解了。这里摘抄一下
'''
ShapeTransformer 单独使用
'''
img1 = cv2.imread('./image/shape/13.png', -1)
contours1, _ = cv2.findContours(img1, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
points1 = make_points(contours1[0])
img2 = cv2.imread('./image/shape/14.png', -1)
contours2, _ = cv2.findContours(img2, cv2.RETR_TREE, method=cv2.CHAIN_APPROX_NONE)
points2 = make_points(contours2[0])
transformer = cv2.createThinPlateSplineShapeTransformer()
# 所有点都考虑,并不一定是好事情
matches = [cv2.DMatch(i, i, 0) for i in range(points1.shape[0])]
transformer.estimateTransformation(points1.reshape(1, -1, 2), points2.reshape(1, -1, 2), matches)
img3 = transformer.warpImage(img2)
# 采样点,采大约 100 个点
points1 = points1[::points1.shape[0]//100]
points2 = points2[::points2.shape[0]//100]
matches = [cv2.DMatch(i, i, 0) for i in range(points1.shape[0])]
# 重要:applyTransformation 和 warpImage 对 estimateTransformation 的顺序要求是翻过来的
transformer.estimateTransformation(points2.reshape(1, -1, 2), points1.reshape(1, -1, 2), matches)
_, points3 = transformer.applyTransformation(points2.reshape(1, -1, 2))
transformer.estimateTransformation(points1.reshape(1, -1, 2), points2.reshape(1, -1, 2), matches)
img4 = transformer.warpImage(img2)
show_images([
('img2', img2),
('img1', img1),
('Use all points', img3),
('Use 100 points', img4),
('img2 point', draw_points(img2, points2)),
('img1 point', draw_points(img2, points1)),
('ApplyTransformation', draw_points(img2, points3)),
], colnum=4)
使用的几个注意点(重要)
- python 中 estimateTransformation、applyTransformation 必须要传入 (1,n,2) 大小、float32 类型的 ndarry!!!
- cpp 中 estimateTransformation、applyTransformation 同样要是 float32,大小由于 CPP 中不是 numpy,所以没啥,就普通的 vector,即参数类型是 vector
<point2f>类型。 - applyTransformation 和 warpImage 对 estimateTransformation 的要求是反过来的;具体看上面的代码。