二维几何和轮廓
来自本人笔记: https://github.com/masterAllen/LearnOpenCV/blob/main/docs/1.8.md
函数说明:
最重要的是记住,这里的函数基本都是纵坐标在前、横坐标在后!!
基础函数:寻找轮廓、近似轮廓;OpenCV 本身的文档就很不错:链接
- findContours:用法在 find_contours.ipynb 文件中
- findContoursLinksRuns:另一种寻找轮廓的方法,相对更省内存,但是也有一些限制,见下面说明
- applyProxDP:把密集的轮廓(即轮廓上有许多点)近似为较小的点,用法在 dealwith_points.ipynb
处理一堆点时的函数:在 dealwith_points.ipynb 文件中有详细使用
- 要求点集必须是轮廓:
| 功能 | 函数名称 |
|---|---|
| 轮廓周长 | arcLength |
| 轮廓面积 | contourArea |
| 轮廓的矩 | moment, HuMoment |
| 检测轮廓是否是凸集 | isContourConvex |
| 判断某个点是否在轮廓以内 | pointPolygonTest(measureDist=False) |
| 判断某个点到轮廓的距离 | pointPolygonTest(measureDist=True) |
- 点集不一定构成轮廓(当然如果是轮廓也能用):
| 功能 | 函数名称 |
|---|---|
| 包围点集的最小矩形(正方向) | boundingRect |
| 包围点集的最小矩形(任意方向) | minAreaRect + boxPoints |
| 包围点集的凸包 | convexHull |
| 包围点集的椭圆 | fitEllipse, fitEllipseAMS, fitEllipseDirect |
| 包围点集的圆 | minEnclosingCircle |
| 点集模拟的线 | fitLine |
- 处理两个轮廓:
| 功能 | 函数名称 |
|---|---|
| 寻找两个轮廓的交集(必须是凸多边形) | intersectConvexConvex |
| 寻找两个矩形的交集(和上面的区别见具体细节) | rotatedRectangleIntersection |
- 匹配和变换两个轮廓,具体请查阅 1.8节的记录:
| 功能 | 函数名称 |
|---|---|
| 比较两个轮廓一 | matchShapes |
| 比较两个轮廓二 | ShapeDistanceExtractor |
| 比较两个轮廓三 | HistogramCostExtractor |
| 变换轮廓 | ShapeTransformer |
其他杂项:
- convextiyDefects: 凸包缺陷检测
- connectedComponents, connectComponentsWithStats: 连通域相关的函数
具体细节
大部分函数的实现都在 find_contours 和 dealwith_points.ipynb 文件中,没有的也都是很简单纯粹的函数,下面是几个还需要再讲讲的函数。
findContoursLinksRuns
官方文档写的就不错,而且这个函数不用啥参数,直接就是一张图片就行:

moments, HuMoments
什么是 moments,这篇文章 和 这篇文章 讲的非常不错,用法也直接参考第一篇文章就行。
简单而言,moments 叫做矩,两个作用:可以用来求轮廓质心、求 HuMoments;而 HuMoments 则是图像的 Hu 不变矩,是指目标具有旋转、缩放不变性,即目标的 Hu 不变矩不会随其大小、方向变化而变化。
RotatedRect 类型
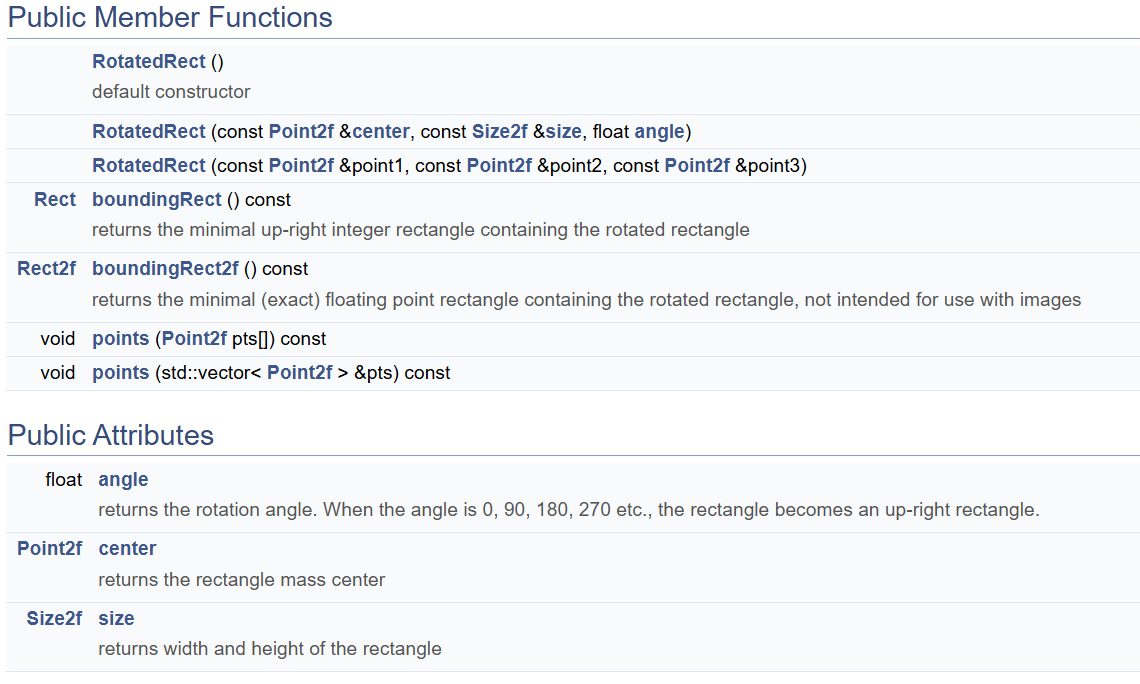
Python 中默认把函数返回的 RotatedRect 类型作为 tuple,而有时需要利用 RotatedRect 的方法。返回的方式为 (center, size, angle),所以只要用构造方法即可:
# 获取 rotatedRect 的点
point_set = np.array([[20, 20], [20, 13], [28, 19], [33, 18], [17, 31]])
rect1 = cv2.minAreaRect(point_set)
points1 = cv2.RotatedRect(*rect1).points()
rotateRectangleIntersection
和 intersectConvexConvex 的区别就在于,rotate 输入的是 RotatedRect 类型,intersect 输入的是轮廓。如果两个都是 rotatedRect,那就用前者;否则就用后面。
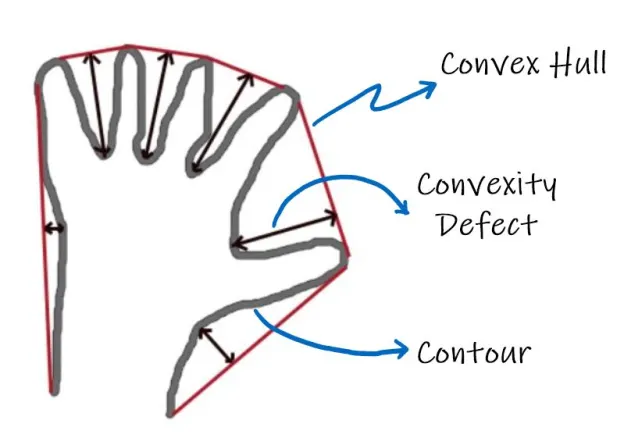
convextiyDefect
凸包缺陷检测,即传入轮廓和凸包,得到凸包和轮廓之间的间隙,参考这篇文章,写的极好,他的图片介绍也很好:
connectedComponents
这篇文章写的极好,本身函数没有太大的坑点,只要知道这是负责得到图片的各个连通域的。后续可以用这些连通域进行分割等操作。